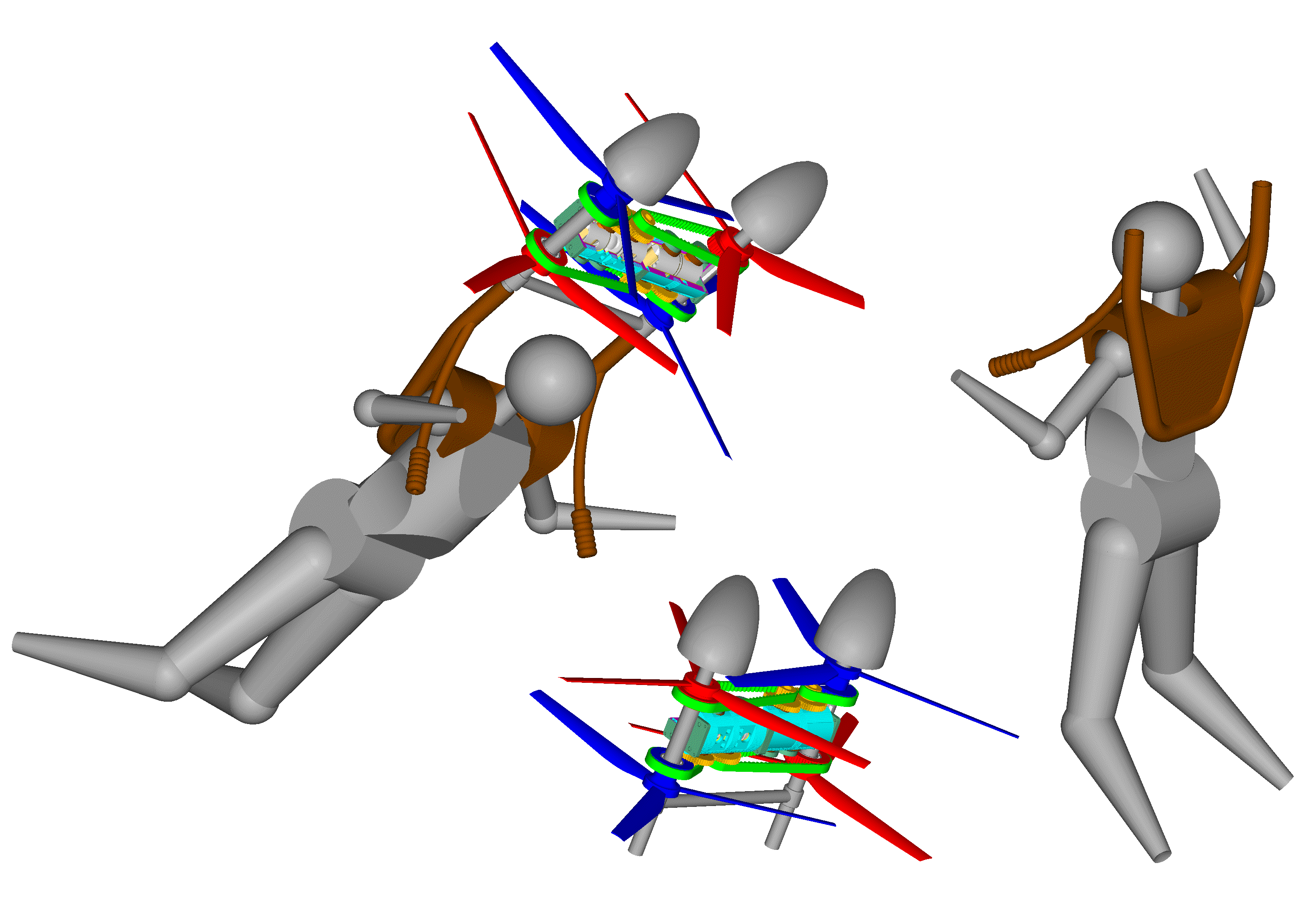
The following drawing shows a pilot / rider wearing a Portable Flyer:
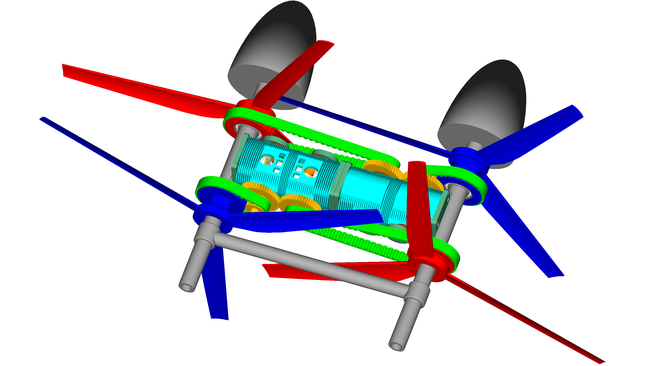
The two OPRE_Tilting engines (which are quite short engines relative to their capacity) are arranged "axially" to form the basis of the caging / frame at the ends of which are rotatably supported two pairs of rotors.
Each OPRE Tilting engine drives, by a pair of tooth belts, two synchronized counter-rotating rotors; the one tooth belt is substantially longer than the other.
At the top of the frame, above the top rotors, they are secured spinners inside which there are rescue parachutes for emergency landings.
Click here or here to enlarge, or click here for a windows "exe" animation.
The throttle cables, the fuel lines, the triggers for the parachutes etc pass through the pipes of the frame.
There are two completely independent "propulsion units" (each comprising an engine and two counter-rotating rotors), with each propulsion unit being capable, alone, to safe land the Portable Flyer.
Yaw control at hovering:
The pilot displacing properly his legs / arms in the downstream of the propellers, is pushed by a pair of eccentric aerodynamic forces that cause the rotation (yaw) of the Portable Flyer about its vertical axis towards any direction:
From hovering to cruising:
The pilot by extending his legs / arms towards a destination, displaces the center of gravity of the Portable Flyer relative to the plain defined by the rotation axes of the propellers, which causes the propeller axes to "lean" towards the destination.
The vertical component of the thrust takes the weight of the Portable Flyer, while the horizontal component of the thrust accelerates the Portable Flyer towards its destination.
As the cruising speed of the Portable Flyer increases, the aerodynamic drag displaces the pilot away from the vertical position, reducing his frontal area.
At some cruising speed, the pilot is at a 60 degrees leaning from vertical:
wherein the frontal area nearly halves, and wherein the lift is about equal to the drag. The aerodynamic lift balances a significant part of the weight of the pilot; the rest weight is balanced by the vertical component of the propellers thrust.
A "nose up" in an airplane (due to a disturbance) may end up with a stall or accident; a "nose up" in a Portable Flyer causes a horizontal deceleration and - in the worst case - ends up with hovering.
A "nose down" in the Portable Flyer is automatically corrected: the aerodynamic drag and the weight keep the center of gravity lower than the centers of the propellers.
SAFETY
As the Osprey, the Portable Flyer is capable for "vertical take-off /
landing (like a helicopter), and for high-speed long-distance high-mileage flights (like an airplane).
The malfunction of the one propulsion unit (due, for instance, to an engine failure, or to a rotor breakdown, or to a broken tooth-belt etc) is not fatal because the other (completely independent) propulsion unit, ALONE, is capable for the safe landing of the Portable Flyer.
In the Osprey V-22 the malfunction / collapse / breakdown of the one rotor may turn out fatal, especially during a vertical take-off or landing.
In comparison, the Portable Flyer with the two OPRE Tilting engines is safer.
The breakdown of a rotor of a propulsion unit is not fatal: the other propulsion unit of the Portable Flyer (comprising an engine and two counter-rotating rotors) enables a safe landing or, if necessary, the flight to the closest safe landing place.
Even in the case wherein both propulsion units fail, or in the case the Portable Flyer runs out of fuel, the Portable Flyer can still, using the rescue parachutes, land safely.
PORTABLE FLYER project as filed for the GoFly-BOEING contest.
The above drawing is from the PORTABLE FLYER project as filed for the GoFly / BOEING contest (wherein the point was to "design and build a safe, quiet, ultra-compact, near-VTOL personal flying device capable of flying 20 miles while carrying a single person").
Here is the "DEVICE TECHNICAL REPORT", as filed.
Here is the "LOW RESOLUTION GRAPHICS", as filed.
Here is the "HIGH RESOLUTION GRAPHICS", as filed.
Here is the "GENERAL ARRANGEMENT DRAWING", as filed.
Here is the "INBOARD PROFILE DRAWING", as filed.
Here is the ABSTRACT.
Three legs with aileron, instead of the four legs of the POGO-XFY-1,
two pairs of contra-rotating propellers instead of the one of the POGO,
vectored thrust instead of fixed thrust direction of the POGO.
Another safe arrangement
The following Portable Flyer uses two OPRE Tilting engines (more at OPRE Tilting Engine) each driving a pair of counter-rotating intermeshed rotors through reduction gearings (sprockets / toothed belts).
The hubs of the rotors are hollowed.
The frame extends from bellow the lower rotors to above the top rotors, ending in cone-shaped cases ("non-spinning" spinners) improving the air flow and containing rescue parachutes for emergency landings.
Click here for a controllable windows exe stereoscopic animation
At horizontal flight the frontal area is minimized (the engines and the pilot / rider are "in line": the one engine is hidden behind the other, the pilot is hidden behind the engines) allowing extreme maximum velocities.
The two counter rotating crankshafts of each engine "share" the
same combustion chamber keeping the basis perfectly rid of inertia vibrations and of combustion vibrations.
The basis (i.e. the rider / pilot) needs not to provide any reaction
torque (not even at extreme changes of revs and load).
With the symmetric counter-rotating rotors (and crankshafts), the
total "gyroscopic rigidity" is zero, i.e. the rider can "instantly" (as
instantly as with the rotors stopped) vector the thrust to the
desirable direction (more at Portable Flyer).
The above make "a true neutral propulsion unit": neither vibrations, nor reaction torque, nor gyroscopic rigidity; only a force that can "instantly" and effortlessly be vectored towards the desirable direction.
As aerodynamic "controls" the rider / pilot can use his legs, hands
and body, just like the wing-suiters do. A wing-suit fits with the
Portable Flyer, especially for long flights and fast aerobatics.
With 1m diameter rotors and 100Kp (220lb) total (including the
rider and the fuel) take-off weight, the rotor "disk loading" is only
half of the rotor "disk loading" of the Osprey (Bell Boeing V22).
And this is with the one only propulsion unit in action.
Here is a version of the Portable Flyer wherein the rotors of the same side are rotating at the same direction:
VTOL vehicles having improved safety:
In a VTOL vehicle (like a helicopter, a Portable Flyer etc) an unconventional frame extending above any main rotors (those providing the lift) offers new opportunities in safety and architecture/design.
The main rotor of a conventional helicopter divides the space into an area above the main rotor and an area underneath the main rotor wherein the fuselage (or the load) is. The area above the main rotor is not accessible:
In a PatTol helicopter:
the frame extends (through the hollowed hub of the main rotor) into the area above the main rotor, providing support to auxiliary / safety equipment.
The deployment of a rescue parachute (stored, during the flight, into a case (a "non-spinning" spinner) secured onto the frame above the main rotor) is rid of the obstacle of a rotating, above it, rotor:
A tail boom arranged in the area above the main rotor and having a tail rotor at its end, gives new design and safety options.
In a conventional "contra-rotating" helicopter:
the support and driving of the top rotor is an issue; also the control over the top rotor.
In a PatTol "contra-rotating" helicopter:
the support of the top rotor is easier and more robust / safe.
The engine(s) and the transmission can be arranged in the space between the contra-rotating rotors, or below the lower rotor, or even above the top rotor.
The fuel (for engines above the lower rotor) and the control (of engines and rotors) pass through the hollowed extension of the frame.
A rescue parachute can be stored in a case secured at the top of the frame, above the top rotor.
In a PatTol Air-Crane:
the frame is a long mast whereon several hollowed-hub rotors are rotatably mounted (with each having, preferably, its own motor and transmission). At the bottom of the mast is a basket (fuselage) for passengers, or for cargo.
The big diameter rotors provide the required lift, the top motor/propeller is for the propelling the air-crane.
A rescue parachute, at top, is for safe landing in case of emergency.
Simple, cheap, robust, lightweight and safe, it suits for air-cranes, for fire-fighting, for rescuing people trapped in hazardous areas etc.
The following PatTol airplane / helicopter (likewise the Osprey V22) uses a main propeller with hollowed hub.
The frame extends from the fuselage to the area above the main rotor, wherein a wing, with two propellers, is secured.
During a vertical take off, the propellers provide the required reaction torque, while most of the power is provided to the main rotor.
Progressively the power to the main rotor reduces and the power to the propellers increases (with the pitch of the propellers properly aligned). The vehicle accelerates horizontally with more and more of the required lift provided by the wing.
Later, power is provided exclusively to the propellers. The main rotor gets to a stall and is secured on the frame at a position minimizing the aerodynamic resistance and the instability of the vehicle.
Etc.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}