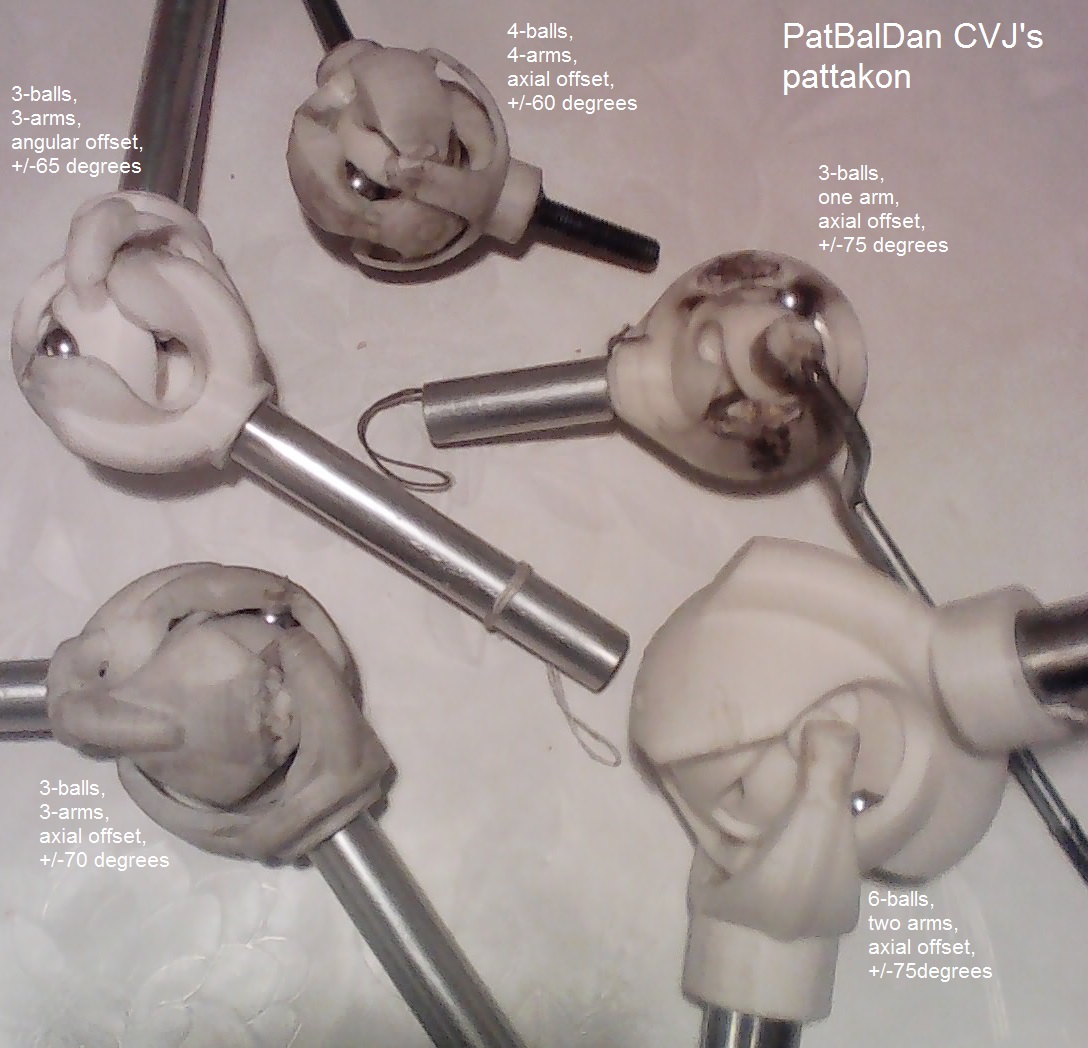
The PatBalDan is a CVJ (Constant Velocity Joint) of the ball type.
Quote from the US1665280 patent of Alfred Rzeppa (titled UNIVERSAL JOINT, filed April 2, 1927):
"In combination with a pair of shafts, an independent universal connection unit for such shafts comprising an outer ball race member and an inner ball race member, said members provided with registering curved ball receiving grooves, a ball cage between said members, balls carried by said cage within the grooves of said race members to lock said members to rotate together, a socket on one shaft receivable over said universal onnection unit and means to lock the outer ball race member thereto to rotate therewith, and a part on the other shaft engageable within the inner ball race member to lock it to rotate therewith."
End of Quote.
The CVJ's used in almost all modern FWD (Front Wheel Drive) and AWD (All Wheel Drive or 4x4) cars are of the "ball" type and follow the basic design of the Rzeppa Universal Joint with some improvements, among which are the use of offset "ball receiving grooves" to hold, without additional mechanisms, the cage permanently on the homokinetic (or medium) plane of the joint, and the use of improved "ball receiving groove designs" for the sake of lower friction loss.
A characteristic (and limitation) of the above universal joints is the maximum operational angle between the rotation axes of the two shafts.
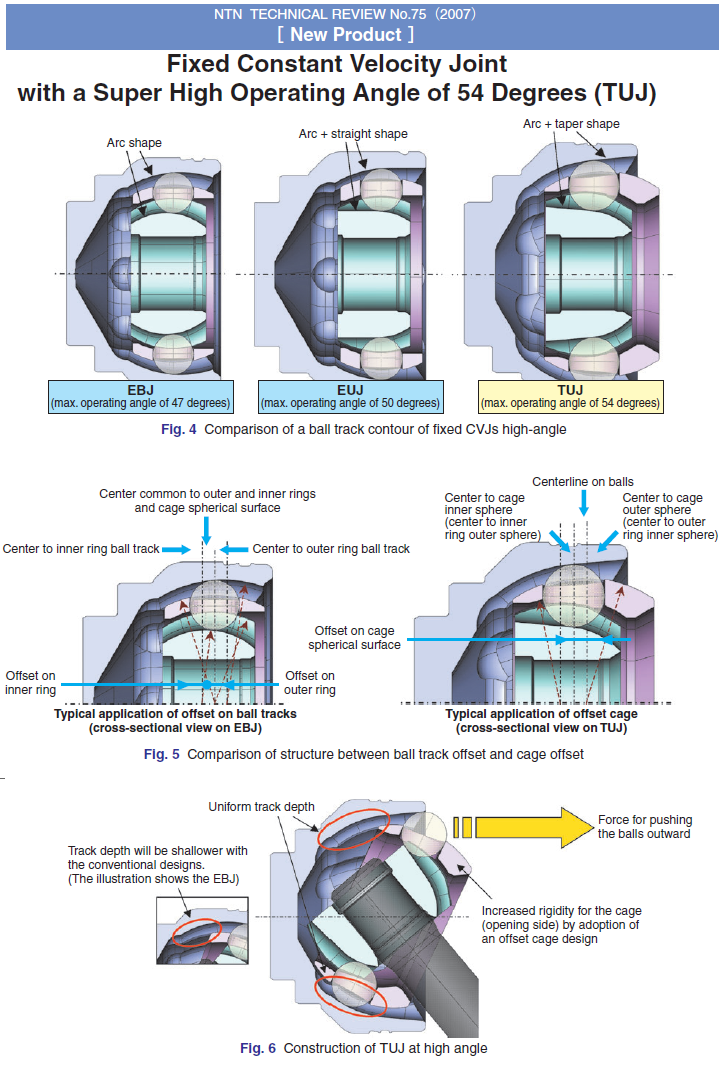
The typical "fixed" ball universal joint used in cars has a maximum operating angle of 47 degrees; the grooves / tracks are arc-shaped.
In order to extend the above "bending" angle for another 3 degrees, the CVJ designers moved from the arc-shaped tracks to arc+linear shaped tracks.
To further extend the above "operating " angle for another 4 degrees (allowing a maximum operating angle of 54 degrees), the arc+linear shaped tracks changed to arc+taper shaped tracks.
To the question:
"Why the larger operating angles are preferable / significant / important?"
it replies the following quote from the officially published (2007) TECHNICAL REVIEW No.75 of NTN (one of the largest, worldwide, maker and supplier of car CVJ's and car transmission parts):
"Fixed Constant Velocity Joint with Super High Operating Angle of 54 degrees.
. . .
This maximum operating angle (54 degrees) for automotive driveshaft is currently the highest in the automotive industry.
The increase of 4 degrees in operating angle means that the minimum turning radius of an average medium-sized FF car can be decreased by approximately 70cm (13%) or the wheelbase of such class of a car can be enlarged by approximately 40cm (15%) while maintaining a minimum turning radius.
In other words, a medium-sized can feature a turning radius of a compact car or the passenger space of a larger car allowing designers more flexibility in consideration of layout and design"
End of Quote
Where the limitation of the maximum operating angle of the ball CVJ's comes from?
As the angle of the universal joint increases, the shaft secured to the inner race member hits on (or collides with) the tracks formed on the outer race member. From another viewpoint: at the greater operating angles, the tracks of the outer race member "cut" the second shaft limiting its diameter.
For instance:
With "arc-shaped" tracks, for a bending angle of 54 degrees each track on the outer race member needs to extend angularly for at least 54/2=27 degrees at each side of the bisecting plane of the angle formed by the rotation axes of the two shafts. At the maximum operating angle between the shafts (54 degrees), the one end of the track on the outer race covers 27+54=81 degrees, leaving the rest 9 degrees for the second shaft to pass, which
means a total of 2*9=18 degrees "free" space for the second shaft to pass, which degreases substantially the diameter (and the strength) of the joint. With a, say, 70mm diameter of the arcshaped grooves, 18 degrees correspond to maximum possible second shaft diameter of 11mm (70mm*sin(18/2)=10.95mm).
This explains the need for unconventionally shaped tracks (arc+linear or arc+taper) in order to achieve larger operating angles (50 degrees in the first case, and the world top 54 degrees in the second case).
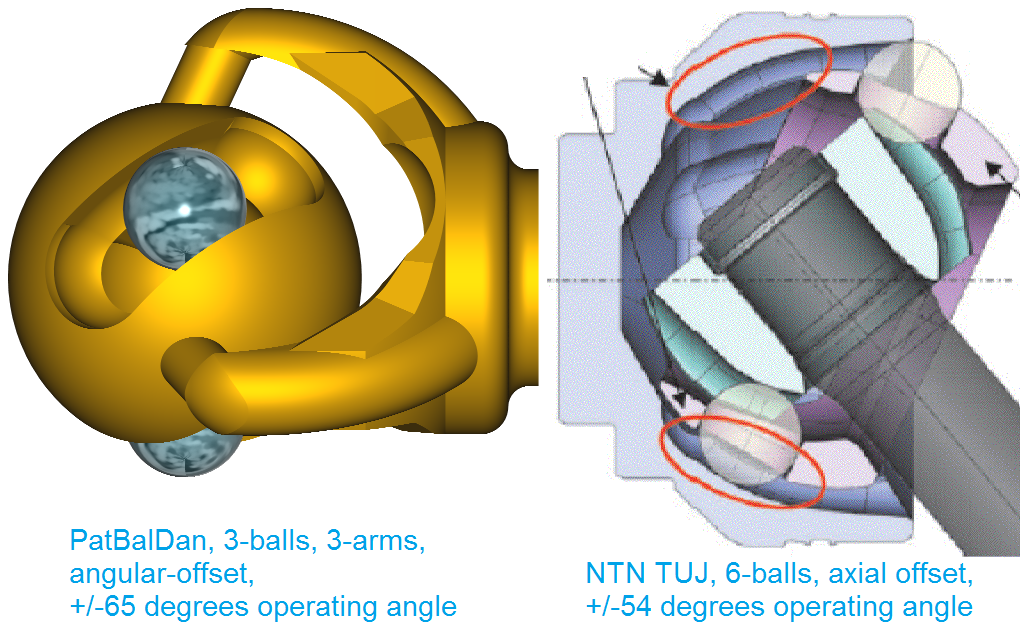
According the previous quote and calculations, the state-of-the-art automotive CVJ is impossible (geometrically) to operate with an angle of 60 degrees between its shafts.
The PatBalDan CVJ (or universal joints) is capable, among others, for substantially higher bending angles, even for over 80 degrees (which is 50% larger than the current world maximum). And this can be done with any kind of tracks and/or offset (curved, curved+linear, curved+taper, axial offset, angular offset, cage offset etc).
According the "rule of thump" mentioned in the previous quote, with each 4 degrees larger operating angle, the turning radius reduces by 0.7m or the wheelbase increases by 0.4m.
Applying the above "rule of thump" on a medium size car equipped with the "Super High Operating Angle of 54 Degrees" CVJ's", the replacement of the CVJ's by a PatBalDan CVJ having, say, 74 degrees operating angle (74=54+5*4) will reduce the turning radius by 5*0.7m=3.5m or the wheelbase will increase by 5*0.4m=2m.
A long-big car propelling its front wheels through PatBalDan CVJ's has, among others, smaller turning radius than a substantially smaller car, can U-turn in narrower roads, can follow narrower/steeper paths and can be parked substantially easier.
In the following drawings:
the outer race member 6 is secured on (or is integral with) the shaft 1 of the joint.
The outer race member 6 comprises an opening / side-passageway 12 at its side; this passageway 12 is extending between two neighboring tracks 8a, 8b of the outer race member 6.
For comparison, while the outer race member of the state-of-the-art ball CVJ also comprises an opening / passageway, this passageway is arranged neither along, nor between, a pair of tracks, but outside the tracks, and through this "central" opening it exits "straightly" the shaft secured on the inner race member.
In this arrangement there is a single side-passageway 12 (better shown in Figs 1, 2, 3 and 6(a)), and through this passageway 12 it exits an arm 14.
At the one end of the arm 14 (that inside the outer race member 6) it is secured the inner race member 7 (at an area between two neighbor tracks of the inner race member), while at the other end of the arm 14, outside the outer race member 6, it is secured the shaft 3.
The arm 14 and the inner race member 7 can be integral with the shaft 3.
In this arrangement there are three tracks / grooves (like 8) on the outer race member 6, and another three tracks / grooves (like 9) on the inner race member 7.
There are three balls (like 10), each engaging two tracks (one on the outer race member 6 and one on the inner race member 7).
There is also a control member 11 (acting, more or less, as the conventional CVJ cage) that forces the plane defined by the centers of the three balls to pass through the center 5 of the joint (i.e. the point wherein the rotation axes 2 of the shaft 1, and the rotation axis 4 of the shaft 3 intersect when they are not at a
straight line).
The tracks are "parallel" to the rotation axis of their race member;
the tracks are axially offset, as shown in Fig 6(a).
Due to the axial offset, each ball tends / tries to move (to "fall") to the deeper / wider side of the two tracks it engages (i.e. to the left in the Fig 6(a)), pushing the control member 11 (whereon it also
abuts) to rotate at a direction. But on the control member 11 they abut all the three balls. In order the one ball to move to the deeper / wider side of its own tracks, at least the one of the other two balls has to move towards the narrower / swallow side of its own tracks, and this is done by the action of the control member.
The periphery of the side-passageway results by moving (relative to the first shaft 1 and to the outer race member 6 fixed on the first shaft 1) the second shaft together with its arm 14; keeping the 1:1 transmission ratio, keeping also the "operating" angle at the maximum, the arm "cuts" material from the periphery of the outer race member 6; by removing any "islands" in the side-passageway 6, the joint is ready to operate at any angle from zero to the maximum without collision between the arm and the outer race member.
The operating angle of the specific CVJ is from 0 to 75 degrees at all directions, as demonstrated in Figs. 7 to 14. However, with proper design the operating angle can increase to near 90 degrees, if desired.
The joint is a true constant velocity joint (the rotation of the once shaft by an angle causes the rotation of the other shaft by an equal angle).
The balance web 13 is to counterbalance the eccentric mass of the arm 14.
One of the balls abuts in a cylindrical cut 15 of the control member 11 to keep it in phase with the arm 14 (the cut 16 of the control member 11 is wherein the arm 14 moves avoiding the collision with the control member 11).
As in the conventional CVJ's, an elastic seal/cover can be used to keep the grease inside the joint and the dirt / dust etc outside.
In the following drawings:
the outer race member has two side-passageways (each having a like "8" periphery) through which they exit two arms connecting / securing the inner race member (arranged inside the outer race member) with its shaft. Each side-passageway is arranged between two neighboring tracks of the outer race member.
There are six tracks on each race member, and they have axial offset.
There is a control-member. The two parts of the control member leave space for the arms to exit from the two side-passageways, they also keep all six balls on a plane passing through the center of the joint.
The outer race member is made of two parts enabling the assembly.
The tracks are axially offset. In the specific design (but not necessarily) the offset is such that under a torque load on the shafts, the first, third and fifth balls are pushed towards the one shaft, while the second, fourth and sixth ball are pushed towards the other shaft.
This CVJ is for operating angles from 0 to 75 degrees at all directions. By proper design, it can go beyond 80 degrees operating angles.
In the following drawings:
the PatBalDan CVJ has three side-passageways.
There are three arms, each secured (at its one end) on the inner race member.
There are three tracks on the inner race member and three more tracks in the outer race member.
Each side-passageway is arranged between two neighboring tracks of the outer race member. Each side-passageway has a like "8" shape which results as the respective arm moves (relative to the outer race member) the way it moves at operation.
There are three balls.
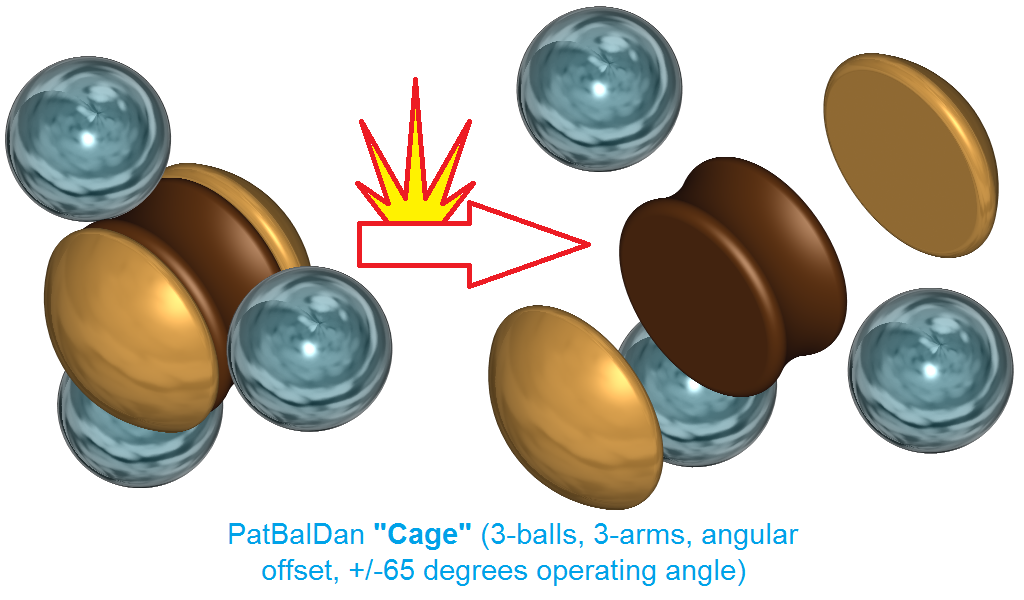
The tracks have a significant angular offset: they lean, in the specific case, for 35 degrees from the rotation axis of their race member.
The angular offset enables constant distance of the ball centers from the center of the joint. This, in turn, enables a different kind of control member: the tracks on the inner race member are open at their bottoms; the center of the inner race member is formed as an empty sphere; a "pulley shaped" control member is located inside the inner race member; on the periphery of this "pulley shaped" control member they abut the three balls with their "bottoms" extending "below" the bottoms of the inner race member tracks.
Supported by two side parts (those like slices of a sphere, Fig 28(6)), the "pulley shaped" control member keeps the centers of the three balls permanently on a plane passing through the center of the joint.
The periphery of the "pulley shaped" part of the control member is, actually, the seventh track of the joint. Each ball abuts simultaneously on one track of the outer race member, on one track of the inner race member, and on the track at the periphery off the control member. And instead of the "point" contact of the balls of the conventional CVJ with their cage, in the present case the balls have linear contact with their control member.
The specific design has an operating angle of 65 degrees as shown in Figs 29 to 36. Theoretically the operating angle of this design (angular offset, three balls) is 70 degrees.
In the following drawings:
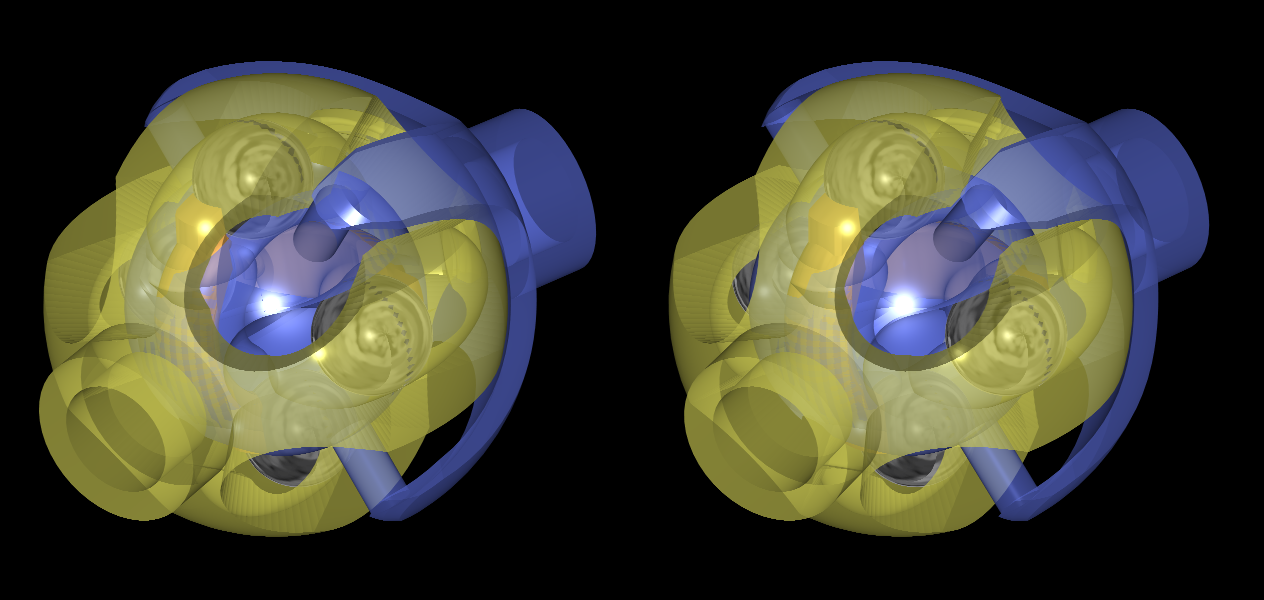
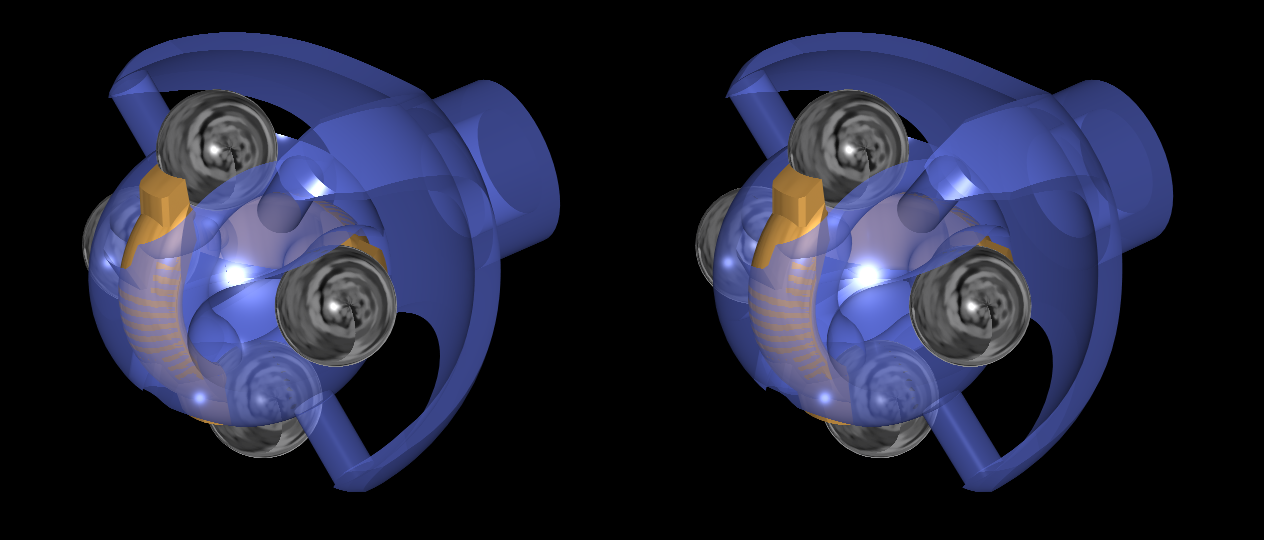
the PatBalDan CVJ has four side-passageways on the periphery of the outer race member; through each side-passageway it passes an arm connecting the inner race member (arranged inside the output race member) with its shaft.
Each side-passageway is arranged between two neighboring tracks of the outer race member (which is made of a main part and of a "cover" part to allow the assembly of the joint; worth mentioning: as in second and third embodiments, the working area or the tracks are on the main part of the outer race member).
The tracks have axial offset.
The two pairs of anti-diametrically arranged tracks have "opposite offset" (the one pair of anti-diametrically arranged balls is pushed, by their tracks, towards the one shaft, while the other pair of antidiametrically arranged balls are pushed, by their tracks, towards the other shaft).
The inner race member comprises two openings; through each opening it passes a "balance / seesaw" that controls a pair of anti-diametrically arranged balls; the one ball pushes, through its seesaw, the anti-diametrical ball and vice versa; in cooperation with the offset tracks, the centers of the two anti-diametrical balls are on a line passing though the center of the joint. The other seesaw does the same for the other two anti-diametrical balls. This way the four balls centers are at the ends of an "X", with the center of the joint being at the center of the "X"; i.e. the balls cannot help having their centers on a plane passing through the center of the joint. Fig 41 is explanatory on how each seesaw controls a pair of balls. The outer race member comprises two parts for the sake of the assembly. After the assembly the two parts are secured to each other and act as a single strong part.
Figs 43 to 50 show the CVJ this PatBalDan CVJ at 60 degrees operating angle (at four different directions), i.e. at an angle more than 10% bigger than the current world top.
The balance / seesaw mechanism besides being simple and strong, it also enables the linear (and not point) contact between the balls and their control member.
As happens in the abovementioned first and third arrangements, the four balls of this arrangement are quite big for the size of the joint, which is an important characteristic for higher load capacity.
As the previous three PatBalDan versions, similarly this arrangement is a true CVJ joint.
In the following drawings the CVJ has only two balls, and the operating angle is +/- 75 degrees at all directions:
In brief:
The PatBalDan is a constant velocity joint of the ball type utilizing an inner race member inside an outer race member, with the outer race member having side-passageways through which arms secured on the inner race member pass, with the arms being secured, outside the outer race member, on a shaft, allowing operating angles larger than the operating angles available in the state-of-the-art ball CVJ's.
Click here to enlarge,
or here (same external diameter, ball-size comparison),
or here (angular-offset; the "cage" at the center of the joint),
or here (4-balls 4-arms axial-offset +/-60deg; stereoscopic view / complete joint),
or here (4-balls 4-arms axial-offset +/-60deg; stereoscopic view / inner parts),
or here (3-balls single-arm axial-offset +/-75deg; "side-looking" spherical cup; animation).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}