PatEff και PatBox CVT (Συνεχώς Μεταβλητή Μετάδοση).
PatEff CVT
Στο SECVT (Suzuki Electronically-controlled Continuously Variable Transmission), που θεωρείται "κορυφαίο" CVT για ελαφρά οχήματα, ένας σερβοκινητήρας υπό τον έλεγχο της ECU (Ηλεκτρονική Μονάδα Ελέγχου) μετατοπίζει αξονικά το μεταθετό μισό της εμπρός τροχαλίας και επιλέγει τη σχέση μετάδοσης.
Καθώς η ενεργός διάμετρος της εμπρός τροχαλίας αλλάζει, η πίσω τροχαλία (υπό τη δράση του "σταθερού" μήκους ιμάντα) προσαρμόζει την ενεργό διάμετρό της.
Το επόμενο διάγραμμα (κλικ εδώ για το "ίδιο" διάγραμμα σε pdf):
δείχνει την απόδοση του SECVT σε σχέση με το φορτίο. Η υπερφόρτιση του ιμάντα δείχνεται με τις χρωματιστές μπάρες (τα δεδομένα είναι από εργαστηριακά πειράματα που έγιναν στο Eindhoven πανεπιστήμιο για το "Formula Student Racecar" project: SECVT).
Συγκρίνετε την "πτώση της απόδοσης" με την "υπερφόρτιση" του ιμάντα.
Ο έλεγχος της σχέσης μετάδοσης από το SECVT είναι εξελιγμένος (η ECU ελέγχει με ακρίβεια την αξονική μετατόπιση - δηλαδή την απόσταση από το κάλυμμα - του μεταθετού μισού της εμπρός τροχαλίας). Το αντίθετο συμβαίνει με τον έλεγχο πάνω στην υπερφόρτιση του ιμάντα (το ελατήριο της πίσω τροχαλίας κάνει ό,τι "θέλει" και όχι ό,τι θα έπρεπε):
Στην "0% LOAD" γραμμή του παραπάνω διαγράμματος η δράση του τorque-cam είναι μηδέν.
Στις "25% LOAD", "50% LOAD" και "100% LOAD" γραμμές, η δύναμη από τον "torque-cam" προστίθεται στη δύναμη από το συμπιεσμένο ελατήριο της πίσω τροχαλίας.
Οι καμπύλες αυτές είναι μετρημένες στο εργαστήριο.
Ενας παράγοντας ασφαλείας (όπως 30%) είναι απαραίτητος για την αποφυγή της ολίσθησης του ιμάντα κάτω από όλες τις συνθήκες.
Οι διακεκομμένες γραμμές S1, S2, S3 και S4 είναι "θεωρητικές" και παριστούν την "αναγκαία" δύναμη για 100%, 50%, 25% και 0% φορτίο αντίστοιχα (αναγκαία υπό την έννοια ότι με μια τέτοια δύναμη δεν υπάρχει ολίσθηση του ιμάντα. Στα επόμενα θα γίνει φανερό πως προκύπτουν αυτές οι γραμμές).
Το αριστερό άκρο της "100% LOAD" "εργαστηριακά μετρημένης" καμπύλης είναι 30% υψηλότερο (παράγοντας ασφαλείας) από το αριστερό άκρο της S1 καμπύλης.
Το δεξί άκρο της S1 γραμμής είναι 50% χαμηλότερο από το αριστερό άκρο της S1 γραμμής επειδή στις ψηλές σχέσεις μετάδοσης, στα δεξιά, η εκκεντρότητα του ιμάντα στην εμπρός τροχαλία είναι διπλάσια σε σύγκριση με την εκκεντρότητα του ιμάντα στην εμπρός τροχαλία στις χαμηλότερες σχέσεις μετάδοσης, στα αριστερά.
Για να περάσει μόνο 50% του φορτίου, η αναγκαία δύναμη είναι μισή σε σχέση με αυτήν για 100% του φορτίου. Ετσι προκύπτει η S2 γραμμή από την S1 γραμμή. Και παρόμοια για τις S3 και S4 γραμμές.
Για συγκεκριμένο φορτίο (εισερχόμενη ροπή) και σχέση μετάδοσης, η διαφορά ανάμεσα στην "μετρημένη στο εργαστήριο" καμπύλη και στη "θεωρητική" καμπύλη δίνει την "υπερφόρτιση", δηλαδή την επί πλέον δύναμη που χωρίς λόγο φορτώνει τον τραπεζοειδή ιμάντα.
Για παράδειγμα, ανάμεσα σε 25% και 50% φορτίο, σε ψηλή σχέση μετάδοσης (overdrive), εκεί δηλαδή που το τυπικό CVT λειτουργεί τον περισσότερο καιρό, η υπερφόρτιση είναι ανάμεσα στο 250% και στο 600%, που σημαίνει πως ο τραπεζοειδής ιμάντας "συμπιέζεται" 2.5 με 6 φορές περισσότερο από όσο χρειάζεται για να περάσει - χωρίς ολίσθηση του ιμάντα - την εισερχόμενη ενέργεια στον άξονα εξόδου (σύμφωνα με το διάγραμμα "Απόδοση - Φορτίο", η απόδοση του CVT στις συνθήκες αυτές είναι γύρω στο 80%).
Το επόμενο σχήμα δείχνει, στο πάνω μέρος, τις ακτινικές δυνάμεις που εφαρμόζονται στον τραπεζοειδή ιμάντα ως αποτέλεσμα της δράσης των δυνάμεων με τις οποίες συμπιέζεται ο ιμάντας από τις κωνικές τροχαλίες.
Η συνολική ακτινική δύναμη στον τραπεζοειδή ιμάντα στην πλευρά της μιας τροχαλίας πρέπει να είναι ίση με, και αντίθετη προς, τη συνολική ακτινική δύναμη που δρά πάνω στον τραπεζοειδή ιμάντα στην πλευρά της άλλης τροχαλίας, όπως στο παραπάνω σχέδιο. Στην περίπτωση χαμηλής σχέσης μετάδοσης, στα αριστερά, μια θλιπτική δύναμη 150Kp εφαρμόζεται στην πίσω τροχαλία από το ελατήριο της πίσω τροχαλίας και προξενεί μια συνολική ακτινική δύναμη 50Kp στον τραπεζοειδή ιμάντα. Η εμπρός τροχαλία πρέπει να εφαρμόσει μια αντίθετη ακτινική δύναμη 50Kp στον τραπεζοειδή ιμάντα, πράγμα που σημαίνει ότι ο μηχανισμός ελέγχου (που στηρίζεται στο κάλυμμα) πρέπει να εφαρμόσει, στο μεταθετό μισό της εμπρός τροχαλίας, μια αξονική δύναμη γύρω στα 150Kp.
Πολλαπλασιάζοντας την εκκεντρότητα R1 του τραπεζοειδούς ιμάντα στην εμπρός τροχαλία με το συντελεστή τριβής (Cf) ανάμεσα στον ιμάντα και την εμπρός τροχαλία και με την αξονική δύναμη (TF, 150Kp στην περίπτωση αυτή) και με 2 (υπάρχουν δύο κωνικά μισά όπου ο τραπεζοειδής ιμάντας ακουμπά και λαμβάνει δυνάμεις) προκύπτει η ροπή Mc που μπορεί να χειριστεί το CVT, δηλαδή
Mc=R1*Cf*TF*2
Η ροπή M από τον κινητήρα προς τον άξονα εισόδου του CVT δεν πρέπει να υπερβαίνει την Mc (περίπτωση χωρίς torque-cam μηχανισμό).
Στην περίπτωση υψηλής σχέσης μετάδοσης (στα δεξιά) η εκκεντρότητα R2 έχει διπλασιαστεί (το R2 είναι περίπου διπλάσιο από το R1), πράγμα που σημαίνει ότι η αναγκαία αξονική δύναμη TF είναι μισή (δηλαδή 75Kp) για να μπορεί το CVT να μεταφέρει την ίδια ροπή Mc; όμως το ελατήριο της πίσω τροχαλίας είναι τώρα πιο συμπιεσμένο και δίνει μια σημαντικά αυξημένη αξονική δύναμη (180Kp), που αντίστοιχα δίνει μια αναλογικά υψηλότερη συνολική ακτινική δύναμη (60Kp) στον τραπεζοειδή ιμάντα, που υπερφορτίζει τον ιμάντα στην εμπρός τροχαλία με μια αναλογικά μεγαλύτερη θλιπτική δύναμη (γύρω στα 180Kp), προξενώντας μια κατά 140% (1.4=(180-75)/75) υπερφόρτιση του ιμάντα.
Στα ελαφρά φορτία αυτή η υπερφόρτιση ανεβαίνει ακόμα και πάνω από το 500%.
Στις ψηλές σχέσεις (overdrive) η δύναμη που το ελατήριο της πίσω τροχαλίας εφαρμόζει θα έπρεπε να μειωθεί δραστικά (ώστε να προκύψει μια θλιπτική δύναμη μόνο 75Kp αντί για τα 180Kp) χωρίς κανένα ρίσκο ολίσθησης του ιμάντα.
Σύμφωνα με τα προηγούμενα, η παρούσα δομή του SECVT (αλλά και των υπόλοιπων CVT's που βασίζονται στο ελατήριο της πίσω τροχαλίας για τη θλιπτική δύναμη πάνω στον τραπεζοειδή ιμάντα) προξενεί μια υπερβολική σύσφιξη (ζούληγμα) του τραπεζοειδούς ιμάντα, ιδιαίτερα στις ψηλές σχέσεις μετάδοσης και στα μεσαία / χαμηλά φορτία, που με τη σειρά της προξενεί:
πρόσθετη τριβή,
γρήγορη φθορά του τραπεζοειδούς ιμάντα,
φθορά στις κωνικές επιφάνειες των τροχαλιών,
σημαντική αύξηση της θερμοκρασίας μέσα στο χώρο του CVT και ανάγκη για αυξημένο αερισμό / ψύξη,
σημαντική απώλεια ισχύος.
Στο παραπάνω σχέδιο φαίνεται η αρχή λειτουργίας του PatEff CVT.
Η ECU ελέγχει την αξονική μετατόπιση E (την απόσταση από το κάλυμμα) της βάσης (44) όπου το ελατήριο (29) της πίσω τροχαλίας (4) στηρίζεται / ακουμπά.
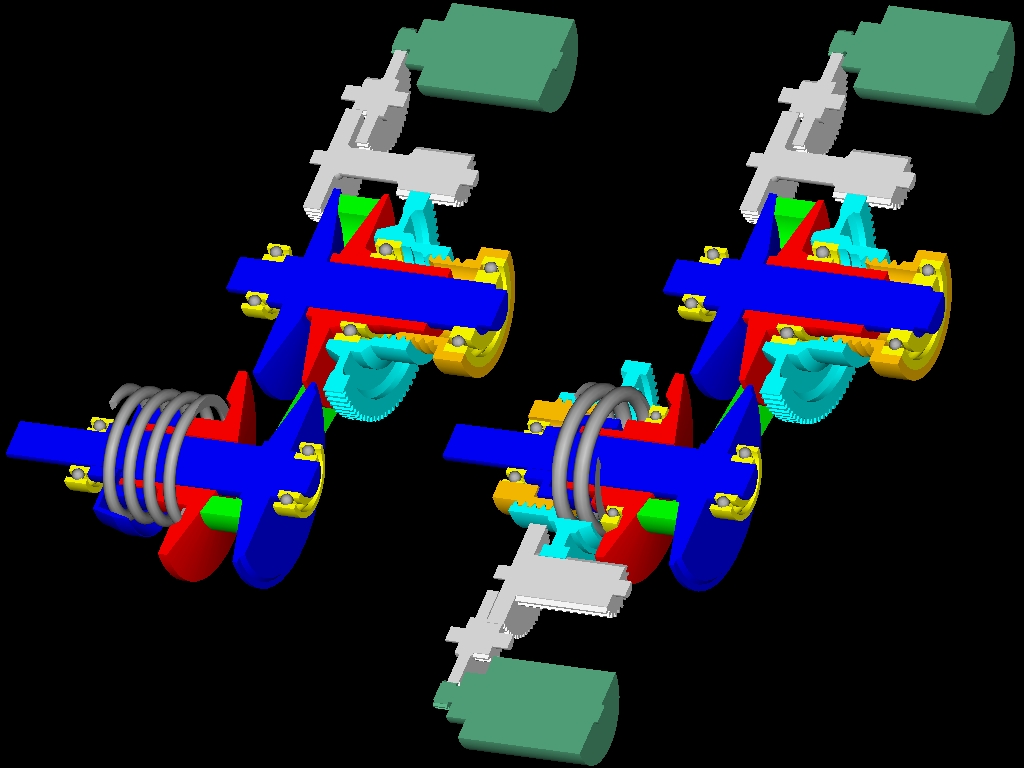
Στα επόμενα δυο σχέδια (κλικ εδώ για μεγαλύτερο έγχρωμο σχέδιο), στα αριστερά φαίνεται το SECVT, ενώ στα δεξιά φαίνεται το PatEff.
Στο πάνω μέρος φαίνεται ο ηλεκτροκινητήρας (servomotor) και ο μηχανισμός που ελέγχει τη σχέση μετάδοσης στο SECVT.
Το στρεφόμενο εξάρτημα με το σπείρωμα (σαν παξιμάδι) συνεργάζεται με το ακίνητο εξάρτημα που επίσης έχει σπείρωμα (όπως μια βίδα). Οταν το στρεφόμενο εξάρτημα αναγκαστεί (από το ηλεκτρομοτέρ, υπό τον έλεγχο της ECU) να περιστραφεί για μερικές μοίρες, το μεταθετό μισό της εμπρός τροχαλίας μετατοπίζεται αξονικά και ο λόγος μετάδοσης αλλάζει.
Στο PatEff CVT ένας παρόμοιος μηχανισμός μπορεί να χρησιμοποιηθεί για τον έλεγχο της δύναμης που εφαρμόζει στον τραπεζοειδή ιμάντα το ελατήριο της πίσω τροχαλίας.
Με τον κατάλληλο έλεγχο πάνω στις αξονικές δυνάμεις που ζουπάνε τον τραπεζοειδή ιμάντα, η υπερφόρτιση μπορεί να μειωθεί δραστικά (ή να ελαχιστοποιηθεί στην περίπτωση χρήσης ανάδρασης) χωρίς το ρίσκο ολίσθησης του ιμάντα.
Με την κατάλληλη σχεδίαση, το ελατήριο δεν συμμετέχει στην περιστροφή της πίσω τροχαλίας (λιγότεροι κραδασμοί, μειωμένη στρεφόμενη μάζα).
Ενα ζεύγος αισθητήρων θα μπορούσε να πληροφορεί την ECU για τις στιγμιαίες γωνιακές ταχύτητες των δυο τροχαλιών.
Σε περίπτωση που η ECU διαγνώσει κατάσταση όπου η σχέση των δυο γωνιακών ταχυτήτων είναι εκτός των αναμενόμενων ορίων (δηλαδή στην περίπτωση που "ξεκινά" ολίσθηση του ιμάντα), το ηλεκτρομοτέρ, υπό τον έλεγχο της ECU, περιστρέφει για λίγες μοίρες το "περιστρεφόμενο εξάρτημα με το σπείρωμα" και συμπιέζει λίγο παραπάνω το ελατήριο, τερματίζοντας την ολίσθηση (ένας παρόμοιος έλεγχος χρησιμοποιείται για την προπορεία του σπινθήρα: η ECU βασιζόμενη σε πίνακες τιμών και στην ανάδραση από τον knock sensor, προσαρμόζει / βελτιστοποιεί το χρονισμό της ανάφλεξης).
Κατά διαστήματα η ECU μπορεί "εσκεμμένα" να αυξάνει τη φόρτιση του ιμάντα (δίνοντας εντολή στο ηλεκτρομοτέρ να περιστραφεί κατάλληλα ακυρώνοντας τυχόν ολίσθηση του ιμάντα) και να αποθηκεύει σε μια βάση δεδομένων ζεύγη γωνιακών ταχυτήτων των δυο τροχαλιών. Η βάση δεδομένων μπορεί αργότερα να χρησιμοποιείται για τη διάγνωση του ξεκινήματος ολίσθησης του ιμάντα και την ακύρωσή του.
Το torque-cam δεν είναι υποχρεωτικό:
σε αύξηση του φορτίου η ECU, μέσω του ηλεκτρομοτέρ, μπορεί να συμπιέσει το ελατήριο της πίσω τροχαλίας όσο απαιτείται (ή, καλύτερα, περισσότερο από όσο απαιτείται, και όταν - σε κάνα δυο δευτερόλεπτα - τα πράγματα στανιάρουν, η ECU μπορεί να μειώσει σταδιακά τη συμπίεση του ελατηρίου για να ελαχιστοποιήσει και πάλι την υπερφόρτιση του ιμάντα, αποφεύγοντας την ολίσθησή του).
Με το CVT να λειτουργεί σε 95% απόδοση, η τριβή θα είναι τρεις φορές λιγότερη από όταν το ίδιο CVT λειτουργεί με 85% απόδοση, ο τραπεζοειδής ιμάντας θε κρατήσει πολύ περισσότερο καιρό, η ισχύς στον τροχό (ή στους τροχούς) θα αυξηθεί κατά περίπου 10%, η ψύξη του CVT θα είναι εύκολη (και λιγότερο ενεργοβόρα) και τα χιλιόμετρα που θα διανύει το όχημα ανά γέμισμα θα αυξηθούν κατά, περίπου, 10%.
Κοιτώντας τα πράγματα από άλλη μεριά: εάν η υπερφόρτιση του ιμάντα μπορούσε να μειωθεί σημαντικά, ο ίδιος ιμάντας και οι ίδιες τροχαλίες θα μπορούσαν να μεταφέρουν σημαντικά μεγαλύτερη ισχύ (και ροπή) χωρίς προβλήματα αξιοπιστίας, κάνοντας το ίδιο CVT κατάλληλο και για άλλες πιο απαιτητικές εφαρμογές (όπως για αυτοκίνητα).
"Αυτόματο" PatEff
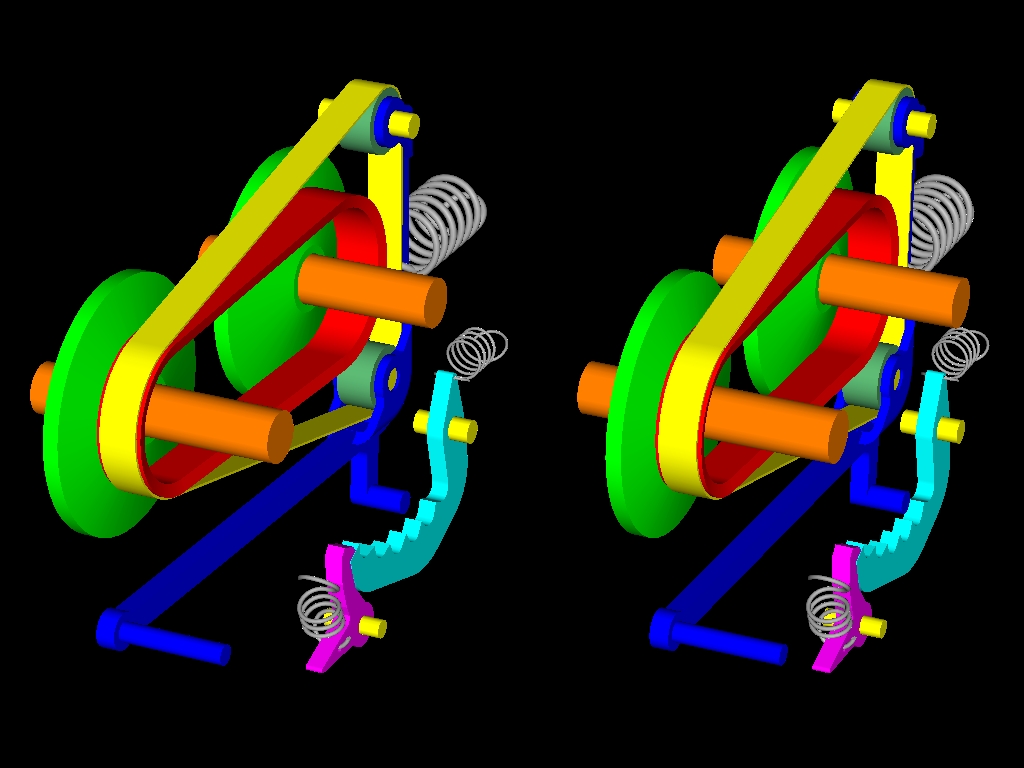
Το επόμενο σχέδιο δείχνει ένα τυπικό CVT με βαριατόρ (variator):
Στο επόμενο σχέδιο το παραπάνω CVT έχει τροποποιηθεί σε "αυτόματο" PatEff:
Ενας φυγοκεντρικός μηχανισμός (όπως ένα βαριατόρ) στην πίσω τροχαλία αντισταθμίζει στις μεσαίες / υψηλές ταχύτητες ένα σημαντικό μέρος της
δύναμης που το συμπιεσμένο ελατήριο εφαρμόζει στο αξονικά μεταθετό μισό της πίσω κωνικής τροχαλίας, ελαττώνοντας με τον τρόπο αυτό την υπερβολική φόρτιση του τραπεζοειδούς ιμάντα.
Στο παρακάτω διάγραμμα:
η συνεχής γραμμή δείχνει τη σχέση "στροφών κινητήρα - ταχύτητας οχήματος".
Από p1 ως p2 ο αυτόματος συμπλέκτης εμπλέκει.
Από p2 ως p3 οι φυγοκεντρικές δυνάμεις στα ρολίνια του βαριατόρ δεν είναι ακόμη αρκετά ισχυρές ώστε να αυξήσουν την ενεργό διάμετρο της εμπρός τροχαλίας και να συμπιέσουν το ελατήριο της πίσω τροχαλίας.
Από p3 ως p4 η σχέση μετάδοσης αυξάνει σταδιακά χωρίς σημαντική αύξηση των στροφών του κινητήρα (η ταχύτητα του οχήματος αυξάνει με τον κινητήρα να λειτουργεί σε περίπου σταθερές στροφές).
Στο p4 το CVT είναι στη μέγιστη σχέση μετάδοσης (overdrive).
Από p4 ως p5 η αύξηση της ταχύτητας του οχήματος είναι ευθέως ανάλογη της αύξησης των στροφών του κινητήρα.
Η s1-s2-s3-s4 διακεκομμένη γραμμή είναι η δύναμη που δέχεται από το ελατήριο το μεταθετό μισό της πίσω τροχαλίας στο τυπικό CVT (η δράση του torque-cam δεν φαίνεται).
Η c1-c2-c3-c4 αξονική γραμμή είναι η δύναμη που δέχεται από το συνδυασμό του ελατηρίου και του πίσω φυγοκεντρικού μηχανισμού το μεταθετό μισό της πίσω τροχαλίας στο τροποποιημένο σε "αυτόματο PatEff" CVT (όπως και πριν, η δράση του torque-cam δεν φαίνεται). Χωρίς ρίσκο ολίσθησης του ιμάντα, το CVT γίνεται σημαντικά πιο αποδοτικό (και αξιόπιστο) στις μεσαίες / υψηλές ταχύτητες του οχήματος. Η σημαντική συμπίεση του ιμάντα στις χαμηλές ταχύτητες κάνει την ανάγκη χρήσης ενός torque-cam προαιρετική (από την άλλη, με ένα torque cam να αυξάνει σημαντικά τη συμπίεση του ιμάντα στα μεγάλα φορτία σε όλο το εύρος ταχυτήτων του οχήματος, το ελατήριο της πίσω τροχαλίας μπορεί να γίνει πιο μαλακό).
Με λίγα λόγια:
Το SECVT και τα βασιζόμενα σε "βαριατόρ" CVT έχουν ένα σημαντικό σχεδιαστικό "σφάλμα": την υπερβολική υπερφόρτιση του τραπεζοειδούς ιμάντα στα μερικά φορτία και στο overdrive.
Το PatEff είναι η "λύση".
Η αναγκαία τεχνολογία υπάρχει ήδη:
Βρίσκεται μέσα στο SECVT της Suzuki και έχει τεσταριστεί στην πράξη για κάμποσα χρόνια.
Βρίσκεται μέσα στο τυπικό CVT: ο "φυγοκεντρικός μηχανισμός" δεν είναι τίποτε περισσότερο από ένα τροποποιημένο βαριατόρ.
PatBox CVT (Συνεχώς Μεταβλητή Μετάδοση).
Στο PatBox CVT ένας βοηθητικός ιμάντας «τρέχει» γύρω από τον τραπεζοειδή ιμάντα και γύρω από ρολίνια τοποθετημένα σε ένα μοχλό.
Η μετατόπιση του μοχλού αλλάζει τη σχέση μετάδοσης.
1 είναι ο «οδηγός» άξονας (ο στροφαλοφόρος στις περισσότερες περιπτώσεις).
2 είναι η «οδηγός» τροχαλία που αποτελείται από δυο κωνικά μισά.
3 είναι ο οδηγούμενος άξονας.
4 είναι η οδηγούμενη τροχαλία που αποτελείται κι αυτή από δύο κωνικά μισά.
5 είναι ο τραπεζοειδής ιμάντας.
6 είναι ένας βοηθητικός ιμάντας. Περιβάλλει τον τραπεζοειδή ιμάντα και ακουμπά / πατά πάνω του προς τη μεριά της οδηγού τροχαλίας.
7 είναι ένας μοχλός που «φέρει» ελεύθερα ρολίνια (12, 13) γύρω από τα οποία «τρέχει» ο βοηθητικός ιμάντας. Ένα ελατήριο επαναφοράς (δεν φαίνεται στο σχέδιο) τραβάει τον μοχλό 7 προς τα αριστερά και διατηρεί το βοηθητικό ιμάντα τεντωμένο.
Η γραμμική ταχύτητα της εσωτερικής πλευράς του βοηθητικού ιμάντα 6 ισούται με τη γραμμική ταχύτητα της εξωτερικής πλευράς του τραπεζοειδή ιμάντα 5.
Με το μοχλό 7 ελεύθερο, το variator ή ρυθμιστής (δεν φαίνεται στο σχέδιο) ελέγχει τη σχέση μετάδοσης κλασικά / αυτόματα. Το διάγραμμα «στροφές κινητήρα / ταχύτητα οχήματος» μπορεί να είναι σαν:
Από το p1 ως το p2 εμπλέκει ο αυτόματος συμπλέκτης (δεν φαίνεται στο σχέδιο).
Από το p2 ως το p3 η σχέση μετάδοσης είναι κοντή και σταθερή. Οι στροφές δεν είναι ακόμα αρκετά ψηλές ώστε να μπορέσει το variator (φυγοκεντρικός ρυθμιστής ή ρυθμιστής) να αρχίσει να αυξάνει την ενεργό διάμετρο της οδηγού τροχαλίας.
Από το p3 ως το p4 το variator (ρυθμιστής) αυξάνει προοδευτικά την ενεργό διάμετρο της οδηγού τροχαλίας (που σε συνδυασμό με το σταθερό μήκος του τραπεζοειδή ιμάντα προξενεί από τη μια τη μείωση της ενεργού διαμέτρου της οδηγούμενης τροχαλίας και από την άλλη την περιστροφή του μοχλού 7 δεξιόστροφα). Η σχέση μετάδοσης μακραίνει (οι στροφές του κινητήρα μένουν σταθερές ενώ η ταχύτητα του οχήματος αυξάνει).
Στο p4 η σχέση μετάδοσης είναι η μακρύτερη δυνατή (η ενεργός διάμετρος της οδηγού τροχαλίας δεν μπορεί να αυξηθεί άλλο) και παραμένει σταθερή ως το p5.
Σε περίπτωση που ο αναβάτης, βάζοντας το πόδι του στο άκρο 11 του μοχλού 7 για παράδειγμα, μπλοκάρει τη δεξιόστροφη κίνηση του μοχλού 7, το προηγούμενο διάγραμμα θα μπορούσε να γίνει:
και το όχημα θα μπορούσε να επιταχύνει ταχύτερα (μιας και ο κινητήρας δουλεύει σε στροφές όπου παράγεται περισσότερη ισχύς).
Μέχρι το p9 η μετάδοση λειτουργεί τυπικά (όπως στο πρώτο διάγραμμα).
Από το p9 ως το p10 ο αναβάτης μπλοκάρει την προς τα επάνω κίνηση του άκρου 11 του μοχλού 7 (και έτσι τη δεξιόστροφη περιστροφή του μοχλού 7). Για να καταφέρει ο variator (ρυθμιστής) να αυξήσει την ενεργό διάμετρο της οδηγού τροχαλίας, θα πρέπει επιπλέον είτε να αυξήσει το μήκος του βοηθητικού ιμάντα (που όμως είναι σταθερό) είτε να μετατοπίσει προς τα αριστερά, μέσω του βοηθητικού ιμάντα, τα ρολίνια και το μοχλό 7 (που όμως τον έχει μπλοκαρισμένο ο αναβάτης). Ετσι η σχέση μετάδοσης μένει σταθερή και κοντή.
Από το p10 ως το p11 ο αναβάτης ελευθερώνει σταδιακά το μοχλό 7 διατηρώντας σταθερές τις στροφές του κινητήρα ενώ η ταχύτητα του οχήματος αυξάνει.
Από το p11 ως το p12 ο αναβάτης μπλοκάρει και πάλι την προς τα πάνω κίνηση του άκρου 11 του μοχλού 7. Η σχέση μετάδοσης παραμένει σταθερή (σαν να έχει επιλεγεί η δεύτερη ταχύτητα σε ένα κλασικό κιβώτιο ταχυτήτων).
Από το p12 ως το p13 ο αναβάτης ελευθερώνει σταδιακά το μοχλό 7 διατηρώντας τις στροφές του κινητήρα σταθερές ενώ η ταχύτητα του οχήματος αυξάνει.
Από το p13 ως το p14 ο μοχλός 7 είναι και πάλι μπλοκαρισμένος (σαν να έχει επιλεγεί η τρίτη ταχύτητα σε ένα κλασικό κιβώτιο ταχυτήτων).
Και ούτω καθεξής.
Είναι χαρακτηριστικό ότι σε όλα τα παραπάνω βήματα ο αναβάτης δεν προσφέρει ενέργεια στο σύστημα. Απλά μπλοκάρει ή ελευθερώνει το μοχλό 7. Η απαιτούμενη ενέργεια για την κίνηση του μοχλού 7 προέρχεται από τον κινητήρα (σαν να έχει servo).
Είναι επίσης χαρακτηριστικό πως με το PatBox CVT κάθε σημείο πάνω από την τεθλασμένη γραμμή p3-p4-p5 του διαγράμματος «στροφές κινητήρα / ταχύτητα οχήματος» είναι προσπελάσιμο. Αυτό σημαίνει ότι το PatBox CVT μπορεί να «αντιγράψει» (να «παραστήσει», να «προσομοιώσει») οποιοδήποτε ρυθμιστή (variator) της αγοράς (όλο κι όλο που χρειάζεται είναι ο κατάλληλος χειρισμός του μοχλού 7). Αυτό με τη σειρά του σημαίνει πως όποιον ρυθμιστή (variator) από την αγορά κι αν χρησιμοποιήσει κάποιος, το όχημα δεν μπορεί να είναι ταχύτερο από ότι με το PatBox CVT.
Αντί να μπλοκάρει το μοχλό 7, ο αναβάτης μπορεί εναλλακτικά να περιστρέψει αριστερόστροφα το μοχλό 7 πιέζοντας προς τα κάτω το άκρο του 11. Το διάγραμμα «στροφές κινητήρα / ταχύτητα οχήματος» θα μπορούσε να είναι:
Μέχρι το σημείο p17 η μετάδοση λειτουργεί αυτόματα (όπως στο πρώτο διάγραμμα).
Στο p17 ο αναβάτη πιέζει γερά το άκρο 11 του μοχλού 7. Η σχέση μετάδοσης μειώνεται «άμεσα» (δηλαδή χωρίς να χρειάζεται να περιμένει να αυξηθεί η ταχύτητα του οχήματος).
Είναι σαν να αλλάζει, ας πούμε, από τέταρτη ταχύτητα σε δεύτερη ταχύτητα σε ένα κλασικό κιβώτιο ταχυτήτων.
Στο επόμενο διάγραμμα η μετάδοση λειτουργεί αυτόματα ως το σημείο p20.
Από το p20 ως το p21 ο αναβάτης μπλοκάρει το μοχλό 7, η σχέση μετάδοσης είναι σταθερή και οι στροφές αυξάνουν γρήγορα.
Στο σημείο p21 ο αναβάτης ελευθερώνει το μοχλό 7. Η ενεργός διάμετρος της οδηγού τροχαλίας αυξάνει και οι στροφές του κινητήρα μειώνονται γρήγορα.
Ο μοχλός 7 περιστρέφεται δεξιόστροφα για μερικές μοίρες (με το άκρο του 11 να μετατοπίζεται προς τα πάνω).
Στο σημείο p22 ο οδηγός μπλοκάρει και πάλι το μοχλό 7. Από το p22 ως το p23 η σχέση μετάδοσης είναι σταθερή.
Στο p23 ο αναβάτης ελευθερώνει τελείως τον μοχλό 7. Οι στροφές πέφτουν γρήγορα μέχρι το σημείο p24 όπου ο αναβάτης μπλοκάρει πάλι το μοχλό 7.
Και πάει λέγοντας.
Στο p25 ο αναβάτης ελευθερώνει (εντελώς αυτή τη φορά) το μοχλό 7. Οι στροφές του κινητήρα πέφτουν και από το σημείο p26 ως το σημείο p4 (και μετά ως το σημείο p5) η μετάδοση λειτουργεί αυτόματα (όπως στο πρώτο διάγραμμα) υπό τον έλεγχο του variator (ρυθμιστή).
Είναι σαν την αλλαγή από πρώτη σε δεύτερη ταχύτητα σε ένα χειροκίνητο κιβώτιο ταχυτήτων (p21 ως p22), μετά από δεύτερη σε τρίτη (p23 ως p24).
Στο επόμενο διάγραμμα το σύστημα μετάδοσης λειτουργεί σαν ένα κλασικό (χειροκίνητο / manual) κιβώτιο ταχυτήτων έξι σχέσεων.
Μέχρι το σημείο p27 η μετάδοση λειτουργεί αυτόματα.
Στο p27 ο αναβάτης μπλοκάρει το μοχλό 7 (και επιλέγει με τον τρόπο αυτό την πρώτη ταχύτητα). Στο p28 ο αναβάτης, ελευθερώνοντας το μοχλό 7 και ξαναμπλοκάροντάς τον στο σημείο p29, επιλέγει τη δεύτερη σχέση. Στο p30 ο αναβάτης αλλάζει σε τρίτη ταχύτητα. Στο p32 αλλάζει σε τέταρτη ταχύτητα. Στο p34 αλλάζει σε πέμπτη ταχύτητα. Στο p36 ο αναβάτης αλλάζει σε έκτη ταχύτητα.
Είναι σαν να αλλάζει ταχύτητες σε ένα «χειροκίνητο» κιβώτιο ταχυτήτων (χωρίς όμως να χρειάζεται συμπλέκτη).
Στο επόμενο διάγραμμα ο αναβάτης διατηρεί από την αρχή τον μοχλό 7 μπλοκαρισμένο. Οι στροφές του κινητήρα πάνε ψηλά. Τότε ο αναβάτης ελευθερώνει σταδιακά το μοχλό 7 διατηρώντας τις στροφές σταθερές.
Αν η μέγιστη ισχύς του κινητήρα παράγεται στις στροφές που αντιστοιχούν με το σημείο p16, η επιτάχυνση του οχήματος γίνεται με τον ταχύτερο δυνατό τρόπο.
Στο επόμενο κινούμενο σχέδιο, ένα πετάλι (15) με εγκοπές (17 ως 22) έχει προστεθεί για να μπλοκάρει το μοχλό 7 σε έξι συγκεκριμένες θέσεις και να δίνει έτσι έξι πρόσθετες σχέσεις μετάδοσης στο CVT.
Για να αλλάξει στην επόμενη σχέση, ο αναβάτης πρέπει να πιέσει ελαφρά το πετάλι 15. Το άκρο 14 του μοχλού 7 αφήνει την εγκοπή όπου ήταν πριν μπλοκαρισμένο και πηγαίνει στην επόμενη εγκοπή (δηλαδή αλλάζει στην επόμενη σχέση μετάδοσης).
Είναι χαρακτηριστικό πως σε όλες τις παραπάνω αλλαγές α αναβάτης δεν προσφέρει ενέργεια στο PatBox CVT. Ολο κι όλο που κάνει είναι που ενεργοποιεί την αλλαγή (την «σκανδαλίζει»). Η απαιτούμενη ενέργεια προέρχεται από τον κινητήρα (σαν να υπάρχει servo).
Στο επόμενο στερεοσκοπικό σχέδιο (Το ένα κωνικό μισό της κάθε μιας τροχαλίας έχει αφαιρεθεί. Κάντε κλικ εδώ για το σχέδιο σε μεγάλο μέγεθος):
το πετάλι 15 που αναφέρθηκε προηγουμένως (το γαλάζιο κομμάτι με τις εγκοπές) φαίνεται μπλοκαρισμένο από το «μάνταλο» (ιώδες χρώμα). Ξεκλειδώνοντας το γαλάζιο πετάλι (όλο κι όλο που χρειάζεται είναι μια ελαφριά πίεση στην εμπρός προεξοχή του μάνταλου), η μετάδοση γυρίζει στο χειροκίνητο τρόπο με επτά διακριτές σχέσεις (έξι επιλεγόμενες με το γαλάζιο πετάλι, συν τη μακρύτερη σχέση μετάδοσης του CVT).
Όταν ο αναβάτης θελήσει να επιστρέψει στη συνεχώς μεταβλητή λειτουργία (άπειρες σχέσεις μετάδοσης), απλά πιέζει βαθιά το γαλάζιο πετάλι και μετά το αφήνει ελεύθερο. Καθώς αυτό επιστρέφει (υπό τη δράση του ελατηρίου επαναφοράς του) το γαλάζιο πετάλι μπλοκάρει από το μάνταλο και η μετάδοση επιστρέφει είτε στον αυτόματο τρόπο με τις συνεχώς μεταβλητές σχέσεις, είτε στο χειροκίνητο τρόπο με τις συνεχώς μεταβλητές σχέσεις.
Μπλοκάροντας ή πιέζοντας το εμπρός άκρο του μπλε μοχλού, ο αναβάτης επιλέγει χειροκίνητα μια σχέση μετάδοσης από τις άπειρες διαθέσιμες.
Ελευθερώνοντας εντελώς τον μπλε μοχλό (το ελατήριο επαναφοράς του μπλε μοχλού, που φαίνεται πίσω, κρατάει τον βοηθητικό ιμάντα τεντωμένο) ο αναβάτης αφήνει τη μετάδοση να λειτουργήσει αυτόματα.
Αυξάνοντας (ή ελαττώνοντας) τη δύναμη επαναφοράς που δρα στον μπλε μοχλό (μετατοπίζοντας το σημείο «αγκύρωσης» του ελατηρίου επαναφοράς του μπλε μοχλού, για παράδειγμα) η χαρακτηριστική καμπύλη του CVT αλλάζει: για να αυξήσει την ενεργό διάμετρο της οδηγού τροχαλίας, ο variator (ο ρυθμιστής) πρέπει να συμπιέσει (μέσω του τραπεζοειδή ιμάντα) το ελατήριο της οδηγούμενης τροχαλίας, πρέπει όμως επιπλέον να μετατοπίσει το μοχλό 7 υπερνικώντας μια ισχυρότερη (ή ασθενέστερη) δύναμη επαναφοράς.
Είναι σαν να αντικαθίστανται «εν ώρα λειτουργίας» τα rollers του variator (του ρυθμιστή) με άλλα ελαφρύτερα ή βαρύτερα.
Σε μια έκδοση δύο-σχέσεων ο αναβάτης αλλάζει από «κανονικό τρόπο» σε «σπορ τρόπο» λειτουργίας πιέζοντας ένα πειράκι (ένα κουμπί) που «αγκυρώνει» ένα ενδιάμεσο σημείο του ελατηρίου επαναφοράς του μπλε μοχλού: το ελατήριο γίνεται σκληρότερο, μια ισχυρότερη δύναμη επαναφοράς δρα στον μπλε μοχλό και ο variator (ρυθμιστής) κρατάει τις στροφές του κινητήρα πιο ψηλά.
Οπως το SECVT (Suzuki Electronically-controlled Continuously Variable Transmission, της Suzuki, που χρησιμοποιείται στο Suzuki Burgman και στο Aprilia Mana και που θεωρείται το πλέον εξελιγμένο CVT για σκούτερ), παρόμοια και το PECVT (PatBox Electronically-controlled Continuously Variable Transmission) μπορεί, επιλεκτικά, να λειτουργήσει σε "χειροκίνητο" τρόπο όπου ο οδηγός / αναβάτης επιλέγει, με ένα κουμπί ή μοχλό, μια συγκεκριμένη σχέση μετάδοσης (από ένα σύνολο διαθέσιμων σχέσεων μετάδοσης).
Συγκρίνετε την πολυπλοκότητα, το κόστος, τα φορτία στα διάφορα εξαρτήματα και τη λειτουργικότητα των παραπάνω δύο ηλεκτρονικά ελεγχόμενων CVT (το SECVT με το PECVT).
Το πρόβλημα:
Με τα υπάρχοντα χαμηλού κόστους CVT o αναβάτης δεν έχει τη δυνατότητα να επιλέξει τη σχέση μετάδοσης της αρεσκείας του.
Η ρύθμιση του CVT στο εργοστάσιο (γεωμετρία των τροχαλιών / του ιμάντα / του variator, μάζα των «βαρών» (rollers) του variator, ελατήρια επαναφοράς κλπ) είναι ένας συμβιβασμός για:
αποδεκτή κατανάλωση,
αποδεκτή επιτάχυνση,
αποδεκτή τελική ταχύτητα,
αποδεκτή αξιοπιστία,
αποδεκτή ικανότητα κίνησης σε ανηφόρες,
αποδεκτά επίπεδα θορύβου, κραδασμών κλπ.
Όμως ο χρήστης του CVT μπορεί να έχει διαφορετικές προτεραιότητες, ή προτεραιότητες που να αλλάζουν ανάλογα με τις συνθήκες που επικρατούν (κυκλοφοριακό, κλήση του δρόμου, «με ή χωρίς» συνεπιβάτη (συνολικό βάρος οχήματος), αντίθετος άνεμος, ανάγκη για αθόρυβη λειτουργία, ανάγκη για γρήγορη επιτάχυνση κλπ).
Ετσι εξηγείται η μεγάλη ζήτηση για aftermarket variators.
Με ένα διαφορετικό, ή τροποποιημένο, variator το CVT λειτουργεί / συμπεριφέρεται διαφορετικά.
Βάζοντας βαρύτερα rollers στον ίδιο ρυθμιστή, οι στροφές που εμπλέκει πέφτουν, το όχημα κινείται με χαμηλότερες στροφές και πιο ήσυχα, η κατανάλωση μειώνεται, το CVT είναι πιο αξιόπιστο. Όμως η επιτάχυνση πέφτει, ένας αντίθετος άνεμος ή μια έντονη ανηφοριά μπορεί να γίνει σημαντικό πρόβλημα, κλπ.
Βάζοντας ελαφρύτερα rollers στον ίδιο ρυθμιστή, οι στροφές που εμπλέκει αυξάνουν, το όχημα επιταχύνει γρηγορότερα, η ανάβαση σε έντονη ανηφόρα είναι εύκολη, ο αντίθετος αέρας δεν είναι πρόβλημα. Από την άλλη μεριά, όμως, ο θόρυβος και η κατανάλωση αυξάνουν, ο χρόνος ανάμεσα σε επισκευές / συντήρηση μειώνεται κλπ
Η αντικατάσταση του αυθεντικού variator (ρυθμιστή) με ένα «βελτιωμένο» από την αγορά είναι σαν την αντικατάσταση του «μαμά» εκκεντροφόρου της μηχανής ενός αυτοκινήτου με ένα «άγριο / βελτιωμένο» εκκεντροφόρο από την αγορά. Με τον άγριο εκκεντροφόρο η ισχύς στις ψηλές στροφές αυξάνει, όμως η μηχανή στις χαμηλομεσαίες στροφές χειροτερεύει (αυξημένη κατανάλωση και ρύποι, λιγότερο ομαλή λειτουργία, χειρότερη απόκριση, λιγότερο «φιλική» προς τον οδηγό λειτουργία κλπ). Με τον σπορ ρυθμιστή (variator) το CVT διατηρεί τον κινητήρα σε άλλες στροφές (υψηλότερες κατά κανόνα) ακόμα κι όταν αυτό είναι κακό.
Μια μακρινή διαδρομή στην εθνική με σταθερή ταχύτητα 80 χλμ/ώρα (όπου ο «μαμά» variator κρατάει τον κινητήρα στις, ας πούμε, 5000r.p.m.) είναι πολύ πιο κουραστική σε σύγκριση με την περίπτωση που ένας «ήπιος» variator (ρυθμιστής) κρατάει, στην ίδια ταχύτητα ταξιδιού, τον κινητήρα στις 4000r.p.m. Στη δεύτερη περίπτωση ο κινητήρας λειτουργεί με μεγαλύτερο «φορτίο» (πιο ανοιχτό γκάζι) που μειώνει την κατανάλωση και αυξάνει την αυτονομία.
Με ένα σπορ variator (ρυθμιστή) τα πράγματα γίνονται ακόμα χειρότερα: στα ίδια 80 χλμ/ώρα ο κινητήρας λειτουργεί στις, ας πούμε, 6000r.p.m. και το γκάζι είναι ακόμα πιο κλειστό (λειτουργία σε χαμηλότερο φορτίο): περισσότερος θόρυβος και κραδασμοί, μειωμένη αυτονομία.
Σε μια γρήγορη διαδρομή, από την άλλη μεριά, όπου ο χρόνος και η επιτάχυνση είναι αυτά που μετράνε, ο σπορ variator (ρυθμιστής) είναι ο νικητής.
Τα χαμηλού κόστους αυτόματα CVT είναι του στυλ: «πάρε το ή άφησέ το», Ο αναβάτης πρέπει να συμβιβαστεί με τα χαρακτηριστικά του CVT.
Ανάλυση: "Προσπερνώντας με ή χωρίς το PatBox"
Αναβάτης οδηγεί το CVT σκούτερ του (με επιβάτη στο πίσω κάθισμα) σε στενό επαρχιακό δρόμο. Πηγαίνει με 80χλμ/ώρα.
Ο κινητήρας λειτουργεί στις 5000rpm (όπου αποδίδει τη μέγιστή του ροπή).
Το CVT δουλεύει σε ένα ενδιάμεσο σημείο της p3-p4 γραμμής του διαγράμματος "στροφές κινητήρα / ταχύτητα οχήματος" :
Ο οδηγός χρειάζεται να προσπεράσει ένα μακρύ φορτηγό που κινείται μπροστά του.
Το μόνο που μπορεί να κάνει είναι να ανοίξει εντελώς το γκάζι και να ευχηθεί να είναι τυχερός.
Το CVT κρατά τον κινητήρα στις 5000rpm και το σκούτερ επιταχύνει, αλλά όχι όσο γρήγορα θα ήθελε ο αναβάτης. Κάθε δέκατο του δευτερολέπτου είναι σημαντικό / κρίσιμο.
Ο ίδιος αναβάτης οδηγεί το τροποποιημένο του σε PatBox σκούτερ (με τον ίδιο επιβάτη στο πίσω κάθισμα) στον ίδιο στενό επαρχιακό δρόμο. Πηγαίνει με την ίδια ταχύτητα των 80χλμ/ώρα.
Ο κινητήρας δουλεύει στις ίδιες στροφές (5000rpm) όπου παράγει τη μέγιστή του ροπή.
Το CVT λειτουργεί στο ίδιο (όπως προηγουμένως) ενδιάμεσο σημείο της p3-p4 γραμμής του διαγράμματος "στροφές κινητήρα / ταχύτητα οχήματος".
Ο αναβάτης πρέπει να προσπεράσει ένα μακρύ φορτηγό που κινείται μπροστά του.
Αντί για ευχολόγια, τώρα ο αναβάτης έχει την επιλογή να χρησιμοποιήσει το μοχλό του PatBox καθώς "πατάει" γκάζι:
Κατά το προσπέρασμα ο αναβάτης (με το μοχλό του PatBox) κρατάει τον κινητήρα στις, ας πούμε, 8000rpm όπου παράγεται η μέγιστη ισχύς του. Ο χρόνος που απαιτείται για το προσπέρασμα πέφτει σημαντικά (για κάμποσα δευτερόλεπτα σε κάποιες περιπτώσεις). Και η απόσταση που απαιτείται για να ολοκληρωθεί το προσπέρασμα μειώνεται κατά πολύ.
Το PatBox δίνει πολλές πρόσθετες επιλογές λειτουργίας. Ομως η δυνατότητά του να ελαχιστοποιεί το χρόνο ενός προσπεράσματος αρκεί, από μόνη της, για να δικαιολογήσει την ανάγκη ύπαρξης και χρήσης του.
Ανάλυση: "Εφαρμογή σε ποδήλατο"
Αντικαθιστώντας τον ρυθμιστή (variator) με ένα ελατήριο που σπρώχνει τα δυο μισά της οδηγού τροχαλίας να πλησιάσουν μεταξύ τους, το PatBox CVT είναι έτοιμο για χρήση σε ποδήλατα.
Η οδηγός τροχαλία αντικαθιστά το εμπρός γρανάζι του ποδηλάτου, η οδηγούμενη τροχαλία αντικαθιστά το πίσω γρανάζι και ο τραπεζοειδής ιμάντας αντικαθιστά την αλυσίδα του ποδηλάτου.
Ενας βοηθητικός ιμάντας περιβάλλει τον τραπεζοειδή ιμάντα (προς τη μεριά της τροχαλίας με το ισχυρότερο ελατήριο) και περνάει γύρω από τα ρόλλερς ενός μοχλού.
Με το μοχλό ο ποδηλάτης αλλάζει / επιλέγει τη σχέση μετάδοσης.
Εαν το ελατήριο της οδηγού τροχαλίας είναι το ισχυρότερο, με το μοχλό 7 ελεύθερο το PatBox CVT "στανιάρει" στη μακρύτερη σχέση μετάδοση (τα δυο μισά της οδηγού τροχαλίας είναι κοντά το ένα στο άλλο).
Εαν το ελατήριο της οδηγούμενης τροχαλίας είναι το ισχυρότερο, με το μοχλό 7 ελεύθερο το PatBox CVT "στανιάρει" στην κοντύτερη σχέση μετάδοση (τα δυο μισά της οδηγού τροχαλίας είναι μακρυά το ένα από το άλλο).
Ο ποδηλάτης αλλάζοντας τη θέση του μοχλού αλλάζει τη σχέση μετάδοσης συνεχόμενα.
Ο ποδηλάτης κάνει πετάλι κανονικά.
Οποτε χρειαστεί μια κοντύτερη (ή μακρύτερη) σχέση μετάδοσης, ο ποδηλάτης σπρώχνει (ή ελευθερώνει) το μοχλό 7, ο μοχλός 7 περιστρέφεται για μερικές μοίρες και κατόπιν ασφαλίζεται στη νέα του θέση μέχρι την επόμενη αλλαγή.
Ενας απλός ρυθμιστής (variator)
Εδώ φαίνεται ένας απλός ρυθμιστής / variator (η τομή του τραπεζοειδούς ιμάντα είναι διπλο-διαγραμμισμένη, τα rollers του ρυθμιστή είναι σφαίρες που κινούνται σε "λούκια": καθώς οι στροφές αυξάνουν, οι σφαίρες κινούνται προς τα έξω αυξάνοντας την ενεργό διάμετρο της οδηγού τροχαλίας):
Με λίγα λόγια:
Το PatBox είναι ένας απλός, μηχανικός, ελαφρύς, φθηνός και αξιόπιστος μηχανισμός.
Σύμφωνα με την προηγηθείσα ανάλυση, μετατρέποντας σε PatBox το CVT ενός σκούτερ (όλο κι όλο που χρειάζεται είναι ένας βοηθητικός ιμάντας και ένας μοχλός με μερικά ρολίνια) ο αναβάτης πέρα από την πλήρως αυτόματη λειτουργία έχει στη διάθεσή του και μια απειρία πρόσθετων χειροκίνητα επιλεγόμενων «σχέσεων μετάδοσης».
Ο αναβάτης μπορεί είτε να αλλάζει, εν ώρα λειτουργίας, τα χαρακτηριστικά της μετάδοσης ώστε να ταιριάζουν με τις υπάρχουσες ανάγκες για επιτάχυνση, ήσυχη λειτουργία, χαμηλή κατανάλωση, αυτονομία κλπ, ή ο αναβάτης μπορεί να αφήσει το CVT να λειτουργήσει κανονικά / αυτόματα.
Αντί να «κινείται» κατά μήκος μιας γραμμής στο διάγραμμα «στροφές κινητήρα / ταχύτητα οχήματος», με το PatBox το CVT μπορεί να «κινείται» κατά μήκος της ίδιας γραμμής, μπορεί όμως να «κινείται» και έξω από αυτήν, στην περιοχή απάνω από τη γραμμή (σαν να αποκτά την ελευθερία να κινείται σε δυο διαστάσεις αντί για μία).
Με τον ρυθμιστή (variator) να εμπλέκει σε χαμηλότερες στροφές (αλλάζοντας για παράδειγμα τα rollers με άλλα βαρύτερα) αυτή η περιοχή επεκτείνεται παρέχοντας πρόσθετους χρήσιμους και αναγκαίους τρόπους λειτουργίας (όπως: πιο άνετα, ήσυχα και οικονομικά ταξίδια στην εθνική) χωρίς συμβιβασμούς στην επιτάχυνση, στην απόκριση, στην τελική ταχύτητα κλπ.
Παρά το ότι το PatBox CVT παρέχει αμέτρητους πρόσθετους τρόπους λειτουργίας, στην ουσία δεν αυξάνει την τριβή. Αντίθετα, με τους πρόσθετους τρόπους λειτουργίας, η συνολική απόδοση (ή αυτονομία, το πόσα χιλιόμετρα δηλαδή κάνει με ένα γέμισμα) αυξάνει, κάνοντας το CVT πιο οικολογικό.
Επί πλέον, το PatBox CVT μπορεί να «αντιγράψει» οποιοδήποτε aftermarket variator. Αυτό σημαίνει πως με ένα aftermarket variator(οποιονδήποτε variator) το όχημα δεν μπορεί να πάει ταχύτερα από ότι με το PatBox CVT.
Το PatBox CVT είναι συγχρόνως: οικολογικότερο και γρηγορότερο.


























{kind=link}
{kind=link}
{kind=link}
{kind=link}