In this stage of the discussion another “reference point” fits: the skydivers.
Quote from my submission:
“Another quite relevant video that shows how precisely the skydivers can control their fall (flight) is at https://www.youtube.com/watch?v=nSi5HaJw3r4 . The weight of the skydiver is its only propulsion unit; by changing his/her body pose, the skydiver literally dances in the air.”
Do see and enjoy this Award-Winning Skydiving video (from the second 41 and after).
They have neither wings, nor engines. Each of them has his mere body (to control his flight) and his mere descending weight as the only propulsion unit.
Let’s make a simple calculation: a 70Kg (155lb) skydiver falling at 160mph (~250Km/h, ~70m/sec) is powered by a power of 700N * 70m/sec = 49kW = 67bhp.
Is the “flight” of these skydivers perfectly controlled?
In order Rossy to show how well he controls his flight, he uses a partner to fly in formation. Similarly the team of skydivers of the video is also flying in formation (or more correctly: they are dancing in the sky).
Unfortunately, the skydivers can only fall. But what if they could “fall” at all directions?
Back to the PORTABLE FLYER
What is the difference of a guy wearing a PORTABLE FLYER from a skydiver who can fly not only downwards, but at all directions (downwards, sideward, upwards, horizontally, vertically etc)?.
Instead of using his weight (which is permanently directed downwards) as the propulsion force, the engines / propellers provide a propulsion force that can be vectored at any direction and that can be substantially stronger than pilot’s weight.
At full power take off, the upwards acceleration is above 1g (10m/sec2). This literally means that a guy wearing the PORTABLE FLYER “falls” towards the sky in a rhythm higher than a skydiver falls towards the ground.
So, a wing is not required. Even the wing suit is optional for the PORTABLE FLYER.
Zapata flies with his FlyBoard-Air without wing because he does not need any wing. His propulsion force well exceeds his weight. When he accelerates like crazy, his body is leaning a lot, more than 45 degrees in some cases, utilizing the flexibility of his body to work it as a displaceable weight and as an aerodynamic surface (aileron); the same when he wants to brake (braking is another important issue for a flying object and has a lot to do with dynamic safety).
Rossy uses his Delta Wing because he cannot do otherwise. With 90Kg (200lb) maximum thrust force (which is well below his total weight at take-off) he cannot take-off vertically. This is why he needs a helicopter to lift him a few thousands feet. Falling from the helicopter he gathers speed and the delta wing gets into play. Only then he can fly the way he does. If his thrust force were double, his delta wing would be quite smaller. If his thrust force were even stronger, he would need not a wing, at all. So, the wing covers the lack of thrust force.
PS. I keep on using “reference points” like: Zapata, Rossy, OSPREY V22, GEN-H-4, EHANG-184, skydivers, wing suiters, Ferrari etc because this way the technical discussion departs from pure theoretical and deals with facts / with the existing practice and how the state-of-the-art can improve.
Hold on there Manolis - you don't even need a wingsuit? Really? So lets say you have all this thrust to accelerate upward at 10m/s2 ('falling upward') - which would be an awesomely impressive amount of thrust , do you believe that your operator will be able to fly around as they choose, - with then portable flyer alone?
You write: “ So lets say you have all this thrust to accelerate upward at 10m/s2 ('falling upward') - which would be an awesomely impressive amount of thrust , do you believe that your operator will be able to fly around as they choose, - with then portable flyer alone?
Yes.
The operator / pilot will be able to fly around as Zapata already does, and better.
Why better?
For a 10 miles or a 10 minutes flight, the total take-off weight of Zapata is 110Kg / 244lb: Zapata’s weight is about 70Kg / 155lb; at take off, he has another 20 Kg (44lb) secured on his feet (it is his Personal Flying Device weight); at take-off, Zapata carries another 20Kg (44lb) at his back: it is the fuel required for 10 miles or 10 minutes of flight.
Why Zapata needs all this fuel for such a short range or time? Because the jet-turbines cannot help running at very low thermal efficiency.
The 10 minutes is the fly duration limit for Yves Rossy, too, who carries (in his delta wing) even more fuel than Zapata.
When a guy who weighs as much as Zapata (70Kg /155lb) takes-off wearing the PORTABLE FLYER (20 Kg / 44lb), he needs for the same range (10 miles or 10 minutes) way less than ten times the fuel Zapata needs, which means less than 20/10=2Kg of fuel. Do lift a weight of 18Kg to see how easy it is, and think how it is to carry it on the air when you fly.
Quote from my submission:
“Tradeoffs summary A personal flying device must be lightweight. The more lightweight (including the fuel or the energy source) the better. Every oz of additional (beyond pilot's) weight requires additional power and additional fuel; the added weight makes the control of the flight more difficult, the landing more risky and dangerous, the noise louder, the range shorter, the mileage smaller, the emissions worse. A personal flying device must be as lightweight as possible; and because weight cannot be removed from pilot's body, weight can only be removed from the power unit and from the energy source (fuel or batteries). A lightweight power unit and, more importantly, a top fuel efficient lightweight power unit, is a good start.”
@manolis "A personal flying device must be lightweight. The more lightweight (including the fuel or the energy source) the better. Every oz of additional (beyond pilot's) weight requires additional power and additional fuel; the added weight makes the control of the flight more difficult, the landing more risky and dangerous, the noise louder, the range shorter, the mileage smaller, the emissions worse."
I agree completely. This class of "wearable aircraft" is what I'm really interested in. Build that sucker and see how it performs :)
@manolis Do you have a parts list and assembly proceedure for your craft? Whats the cost of the parts and where can you get them? How hard is it to build?
A personal flying device should rely on the most efficient method to fly and that is based on the high lift per drag ratio of a wing. A typical 400lbs ultralight, including pilot, have L/D of about 10, and at straight and level flight it needs only 40lbs of thrust, power required of about 10KW.
To fight gravity all the time, I think is the wrong thing to do, it consumes fuel at a really fast rate, as demonstrated by zapata's board.
You write: “A typical 400lbs ultralight, including pilot, have L/D of about 10, and at straight and level flight it needs only 40lbs of thrust, power required of about 10KW.”
A number is missing: the speed.
In order to consume 10kW with 40lb (180N) thrust, the speed of the horizontal flight of the ultralight is (10,000 W / 180N ) = 55m/sec = 200Km/h (125mph).
You also write: “To fight gravity all the time, I think is the wrong thing to do, it consumes fuel at a really fast rate, as demonstrated by zapata's board.”
I agree in that “to fight gravity all the time is the wrong thing to do”.
But Zapata’s extremely low mileage, only partly is justified by the “fight with the gravity”. Rossy, who is based on a fixed delta wing, has a similarly poor fuel efficiency , a similarly short flight duration and a similarly short range with Zapata. Both, Zapata and Rossy, are using a propulsion unit that does not fit with the specific application. Their jet-turbines are lightweight, but almost all the energy (~98%) of the fuel is lost into the exhaust gas; which means they need to carry a lot of fuel which cancels the advantage of the lightweight jet engines. This is why no ultrlight uses jet-turbines.
Back to the “fight with gravity”.
Quote from my submission
Cruising / consumption / mileage
With the pilot wearing a wing suit or a tracking suit, at 100mph cruising speed (87kts / 160Km/h / 44.5m/sec) the required thrust is about 66lb (30Kp, 300N and the calculated power is 300N*44.5m/sec = 13.5kW = 18bhp (data taken from the “First jet powered Birdman flight” at http://www.dropzone.com/news/General/First_jet_powered_Birdman_flight_613.html )
End of Quote.
That is, if the pilot of the PORTABLE FLYER wears a wing suit, then at 160Km/h (100mph) horizontal cruising speed he needs only 18bhp of power, while in order to hover (at vertical position, as during the take off and the landing) it is required 4*15=60bhp of power (the calculations are in my submission at http://www.pattakon.com/GoFly/Portable_Flyer_pattakon_final.pdf, page 11 middle).
Flying horizontally at 160Km/h (100mph) the PORTABLE FLYER needs about 1/3 of the power required for hovering.
Without a wing suit, the respective horizontal cruise speed increases.
After the take-off, the pilot of the PORTABLE FLYER has no reason to not turn to fast horizontal cruise at the optimal speed.
“7.1. Schedule and budget Project execution feasibility
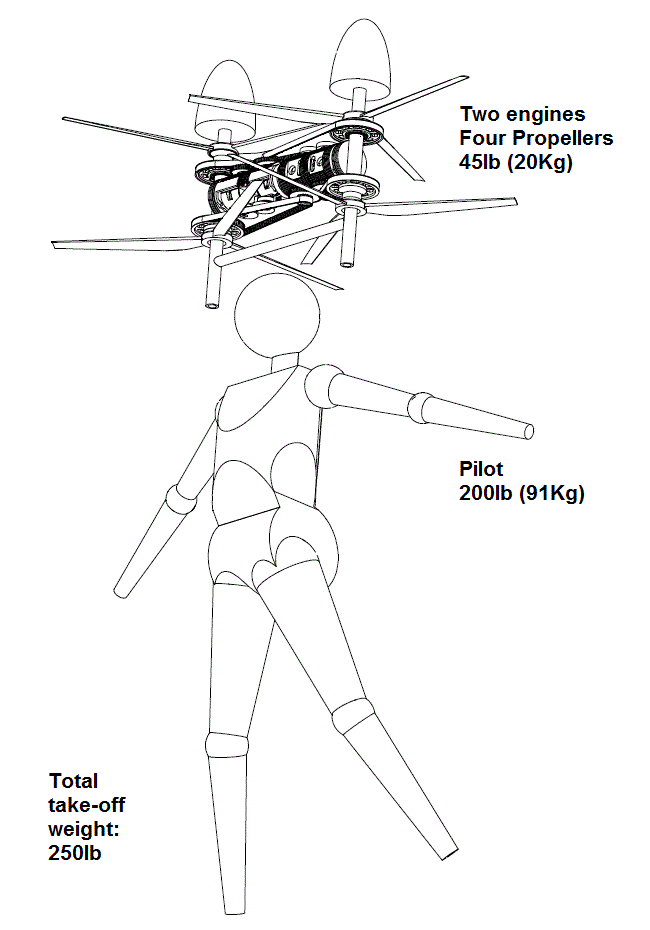
With the manufacturing of the two OPRE Tilting engines, the PORTABLE FLYER is almost ready for tethered tests (four carbon fibre propellers, four toothed belts, eight sprockets, two pipes and a saddle are all it takes to tailor the PORTABLE FLYER on the pilot).
No need for electronics, nor for servomotors, nor for control surfaces etc.
A 333cc proof-of-concept OPRE Tilting prototype engine has been manufactured and tested. The design modifications in order to become a 350cc 2-stage-Ignition OPRE Tilting engine is of minor difficulty.
After the tethered tests and the “tethered training” of the pilot, flying tests at low height above the sea will follow.
. . .
The estimated total cost is 20,000+50,000=US70,000$ (not including the personal work of the pilot).
The cost of the necessary machinery / facilities is included in the total cost of the US70,000$.
E.g., by comparison to the PORTABLE FLYER project, the more demanding “roller-version Variable Valve Actuation” project of pattakon: [a continuously variable valve lift and duration VVA presented at http://www.pattakon.com/pattakonRoller.htm , http://www.pattakon.com/pattakonRollerLight.htm and http://www.pattakon.com/DVA_files/pattakonVVAs.pps (the last link is the presentation of the pattakon VVA projects at the Engine Expo International, Stuttgart Germany, May 2008)], and the modification of a used Honda Civic VTEC 1,600cc car (including the re-programming / tuning of its electronic control unit), had a total cost several times lower than the above estimated US70,000$. Compared to the only two valve lift profiles (10.5mm maximum valve lift) of the original mass production Honda sport car, the modified car provides infinite continuously variable (from 0mm to 12mm) valve lift profiles (as shows the http://www.pattakon.com/vvar/OnBoard/Vtec_files/ValveLifts.gif plot) and was for long tested on the roads, with Its red line shifted from the 8,000rpm of the factory car, to 9,000rpm for the modified prototype VVA-roller car (youtube video at https://www.youtube.com/watch?v=-zzW8YkReLU ).
E.g., by comparison to the PORTABLE FLYER project, the more demanding PatOP prototype 636cc Opposed Piston Diesel engine project (analytically presented at http://www.pattakon.com/pattakonPatOP.htm ) had a total cost (from designing, to patenting, to manufacturing a running proof-of-concept prototype) several times lower than the estimated US70,000$. In the youtube video https://www.youtube.com/watch?v=2ByEgfTTq1I it is shown the quality of operation of this single-cylinder opposed-piston prototype Diesel engine (wherein the only parts from the market are: the piston rings, the plain bearings at the big ends of the connecting rods and the injection system).
Manolis Since I can see that you are looking at a flight and control method that relies on the operator flying at the speed of skydivers falling, I will pull out of the discussion as I dont believe any aspect of what you are proposing is reasonable. Possible, maybe .... but reasonable ... no. I simply dont believe that the future of personal aviation will see the bulk of people travelling around at such high speeds that no wings are required. Your device without wings, if it gets built and produces the thrust to lift a person - will behave mostly like the Gen H-4. There is no way at all - that you will achieve flight like Yves Rossy without a wing. I have no problem with your design, but I totally disagree on the flight you think you will achieve with this. But I do hope you build it so that you can either achieve your goals or realise why it wont work.
@manolis I have to agree with ExpAir. I like the concept but pulling this off will be scarey dangerous. Whos going to be the test pilot? Why not include a wing or 2? Also not haveing landing gear looks like one tripped step away from sliced and diced. I highly recommend that you test this with remote control, good luck Jeff
I think I will continue my designs as well - but not within Gofly limitations . My size estimate would be around 4.5 to 5 meters and allow for VTOL and conventional flight. speeds probably no higher than 55 kts. conventional cruise more like 40kts. Transitional cruise could be 20-30 kts. I will likely add a 3rd wing since im ignoring size constraint so it will be a tilt-wing triplane - but probably able to perform reasonably with upper wing removed if handling seems better without it? Could land in a parking lot - but not in a single parking space. Could land on an open road conventionally Range and noise - dont know. If I can just get the noise not to be irrititating. Biggest hassles are demand on pilot to control - needing to control wing angles and thrust angles manually and not go into bad configurations. Anyway - will be good to get critique from you all
You write: “I dont believe any aspect of what you are proposing is reasonable. Possible, maybe .... but reasonable ... no.”
Let me follow your “reasoning” and ask (with Zapata’s FlyBoard-Air as the reference point this time):
Do you believe that Zapata does fly?
And that he keeps an impressively strict and accurate control over his flight?
And that he flies horizontally at speeds above 100mph? (what is the “limit” you see? At what cruise speed should Zapata put the “red line”?)
And that he lands and takes-off as safely and easily as he does, without landing gearing? (at an “early” landing, say a few seconds after his take-off, he carries on his back ~20Kg (44lb) of fuel which means his body weight and the fuel weight are taken by his legs).
Is the upwards thrust force from the jet-turbines under his feet the only thing that powers Zapata? Is there anything else?
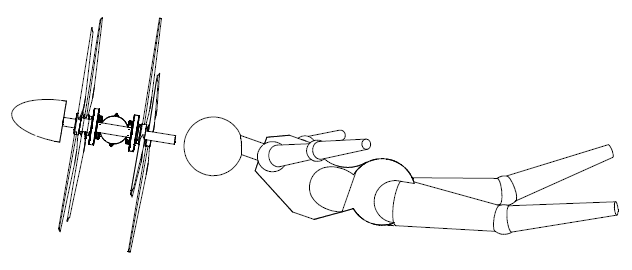
The PORTABLE FLYER can be looked at as a “FlyBoard-Air” wherein: -the pushing thrust force (under the feet of the pilot) is replaced by a pulling thrust force (above the head of the pilot), -the gas-guzzler jet turbines are replaced by lightweight reciprocating opposed-piston engines driving ~1m diameter propellers.
The PORTABLE FLYER is the conventional cart (the horse at front), while Zapata’s FlyBoar-Air is a “cart before the horse”. Both work.
Can Zapata change on pulling thrust? He could easily arrange his FlyBoard-Air above the pilot, with the fuel tank lower; but then the pilot would be roasted by the hot exhaust gasses.
You write: “I dont believe any aspects of what you are proposing is reasonable.”
Here are some “quite unconventional” aspects I am proposing in my submission Would you be kind enough to spot on one (just one is enough) mistake in these “aspects”?
Zero vibrations, zero gyroscopic rigidity, zero reaction torque:
• The symmetry of the engine, the zero phase difference between the two synchronized and counter-rotating crankshafts, the common combustion chamber (same instant pressure on the piston crowns of the two opposed pistons, same (and opposite) instant torque on the two crankshafts), and the symmetrical load (two counter-rotating symmetrical propellers) rids the saddle (and the pilot) of all kinds and orders of vibrations (zero free inertia forces, zero free inertia moments, zero free inertia torques, and zero combustion vibrations of all kinds). This is an absolute requirement when a powerful high revving engine is to be tightened to the body of a person.
• The reaction torque is also permanently zero: no matter how wide the “throttle” is opened, or how abruptly the “throttle” opens or closes, there is no reaction torque (the only that happens is the increase or the decrease of the thrust force provided by the propellers).
• The symmetry and the counter-rotation of the propellers and of the crankshafts maintains the gyroscopic rigidity of the PORTABLE FLYER zero. Even when only the one engine is running (for instance due to a malfunction of the other engine), the gyroscopic rigidity is zero. Zero gyroscopic rigidity means that the pilot “instantly” and “effortlessly” can vector the engine/propellers (i.e. the thrust force) towards the desirable direction, which is an absolute requirement for a safe, accurate and instantaneous control of the flight.
• Without zero inertia and combustion vibrations, without zero gyroscopic rigidity, and without zero reaction torque at the changes of the “throttle”, the control of the flight becomes slow, inaccurate, unsafe, uncomfortable and exhausting.
End of Quote
When it turns to numbers and maths, it doesn’t matter what you believe or what you like; because, as a wise man said: “nobody can argue with mathematics”.
Manolis - you will not have nearly the amount of control over your device that Zapata has over the Flyboard. Theres a fundamental difference. Can you see it? Tell me what you think it is! Im not saying you wont lift off, and i am not critiqueing an aspect of your motor system. Just your control. Now think about it and tell me why you wont fly like Zapata
You write: “you will not have nearly the amount of control over your device that Zapata has over the Flyboard. Theres a fundamental difference. Can you see it? Tell me what you think it is! Im not saying you wont lift off, and i am not critiqueing an aspect of your motor system. Just your control. Now think about it and tell me why you wont fly like Zapata”
There is a “fundamental difference” between the control of the PORTABLE FLYER and the control of the FlyBoard-Air of Zapata.
At hovering and at small - medium speeds (say, below 75mph), while the head – limbs of Zapata are in a, more or less, “stationary air”, the head and limbs of the pilot of the PORTABLE FLYER are inside the strong downwash air stream of the propellers.
What the above does mean for the control?
It means that at small – medium speeds Zapata is based exclusively on the displacement of his weigh relative to the thrust force to control his flight (weight displacement control, as in the GEN-H-4).
It also means that Zapata’s FlyBoard-Air needs deflectors (as those in the exhaust of the two side jet-turbines) for the yaw control. Without them, Zapata has no yaw control.
Contrary to the above, the pilot of the PORTABLE FLYER has, from take-off, to hovering, to any available speed, dual control over his flight: on one hand by displacing his weight relative to the thrust force (as Zapata), and on the other hand by deflecting with his head – limbs the high speed air stream coming from the propellers: the deflectors are his own arms and legs.
Quote from my submission:
“The heavy disk loading (thrust to disk area) of the PORTABLE FLYER (similar to that of the OSPREY V22) causes a high downwash velocity, with the pilot inside it. Either at take off / landing, or at hovering, or at cruising (low / medium / high speeds), pilot’s limbs and head are in a high velocity air stream, which allows the control over the flight in a way similar to the way the skydivers control their flight / fall. The PORTABLE FLYER besides the “weight displacement CONTROL” of the GEN-H-4 (mentioned previously), has also the “aerodynamic CONTROL” of Yves Rossy”
End of quote
PS. The attached youtube video is a 500cc single cylinder, opposed piston, OPRE Diesel engine. Imagine you are the pilot behind the downwash air stream of the propellers.
@manolis Manolis ,good job on the engine , on the craft design what I think is that it is too minimalistic, probably difficult to control it and not safe so it's not very likely people to fly in your way ,the same as for all other examples of crafts that you presented ( I mean Zapata's etc) . The flying machine for everybody must to protect the passenger (pilot ) from the harsh enviroment conditions so he/she must to be enclosed inside of the cockpit, any other configurations where passenger(pilot ) is exposed to high speed wind , low temperatures , rain etc is maybe for some very brave heads but I guarantee you it's not for everibody .Here one more similar to yours so you aren't alone . Somewhere in the childhood times was a story called " Karlsson on the roof " so your craft remind me on Karlsson from this story.
Thanks for the video. At the 1:07 it shows the downwash air stream I was talking about.
You write: “The flying machine for everybody must to protect the passenger (pilot ) from the harsh enviroment conditions so he/she must to be enclosed inside of the cockpit, any other configurations where passenger(pilot ) is exposed to high speed wind , low temperatures , rain etc is maybe for some very brave heads but I guarantee you it's not for everibody “
Zapata flies at only 100mph and is one of the most spectacular shows, ever.
There are millions of motorcycles and scooters on the roads. A good percentage of them travel faster than Zapata and have no cockpits; the riders control the ride by their bodies movements and by their bodies aerodynamics. Try to convince the motorcyclists to be enclosed in cockpits.
If Rossy was enclosed into a cockpit, he could not control his flight and he would miss the best part of the joy: “the open air experience”. With only an altimeter and timer, Rossy uses his skin and ears as airspeed indicators. “I am the fuselage, Rossy says, and the steering controls are my hands, head and legs” "You feel very well, you feel the pressure," Rossy says, "you just have to wake up these senses. Inside an airplane we delegate that to instruments. So we are not awake with our body."
You also write: “on the craft design what I think is that it is too minimalistic, probably difficult to control it and not safe”
I wish I could make it half the size it is now, or even smaller. What is the relation of the size with the control? Is there any better (more precise) control than what we see in Zapata’s and Rossy’s videos? The smaller the size and the weight, the easier the control.
@manolis The motorcyclists are probably less than 1% of all traffic participants so yes they probably will think that your device , Zapata's etc are cool ( and they are ) but the oter 99 % will prefer to remain dry when is rainy outside and to continue to travel during the rain ,etc :) Also 100 mph is too high speed to be exposed on it for too long !Where are this speed limits ( I want to go there :))? Only in Germany on some interstates doesn't have speed limits! The size of the device ( exept for the GoFly competition ) doesn't matter ( there is a lot of space in the air)and much more important is for the device to be safe, quiet , efficient, usable( for everybody not only for young and trained people ) .I haven seen 90 years old grandma on motorcycle but have seen many of them still drive their cars. Now you see where the automated driverless cars are going so you are only required to be able to tell the vehicle where you are want to go .I guarantee you that the future personal flying machines will be pilotless (or otherwise we never will be allowed to fly them as we drive our cars today).
@Flapping Flight I don't think 90 year old grandma is going to be riding on any of the phase 1 winners. Certainly there is a big potential market for comfortable, enclosed, autonomous pod taxis, but that's not going to satisfy Manolis, or me :)
@Dennis K Why not ? Isn't the GoFly vision was the device to be usable for everybody ? Do you think that Manolis device will be easy to operate ( and easy to leurn to fly on)even for young and fit people ? Also Dennis the people aren't birds and they don't have feathers in order to fill the air streams or maybe we have to fly naked :) in order to replace the feathers sensority by skin hear sensority :) Have you , and any body else tought about to complain against insufficient othoryty over the elevators controls:) ? You just need to push the right floor button and that's all. I like to controll all kind of vehicles and machines by myself , so I understand you and Manolis very well and yes probably we will have places where you will be able to practice ( and enjoy ) sports, hobbies , etc but the personal transportation will be fully autonomous and in enclosed comfortable enviroment .